This will show how to setup a mint controller i.e. NextMove ESB-2 with an RS Automation Drive and servo motor but to act as a stepper motor and being controlled from the ESB-2 as a stepper.

Difficulté
Moyen
Durée
30 minute(s)
Sommaire
- 1 Introduction
- 2 Étape 1 - RS AUTOMATION DRIVE SETUP
- 3 Étape 2 - Tell the Drive a gearing
- 4 Étape 3 - Make a correlation
- 5 Étape 4 - Integer value
- 6 Étape 5 - Completes the RS Automation Drive setup
- 7 Étape 6 - Setup the Host controller (ESB-2)
- 8 Étape 7 -
- 9 Étape 8 -
- 10 Étape 9 - NOTE
- 11 Commentaires
Introduction
The following will show how to setup a mint controller i.e. NextMove ESB-2 with an RS Automation Drive and servo motor but to act as a stepper motor and being controlled from the ESB-2 as a stepper.
Étape 1 - RS AUTOMATION DRIVE SETUP
Our actual Stepper motors are 400 steps per revolution which is equivalent to an encoder quadrature count of 400/4 = 100.
Étape 2 - Tell the Drive a gearing
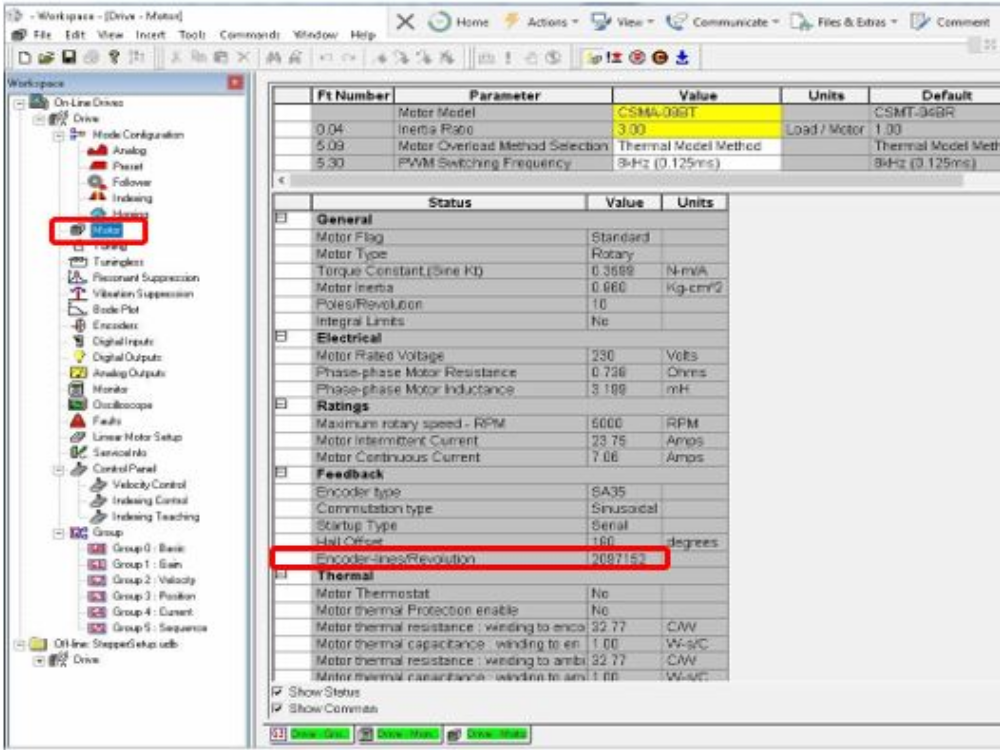
First we must tell the Drive a gearing based on the 100 count virtual encoder we have and actual motor encoder counts.
In the picture above shows the drive with its motor connected which gives us an encoder count of 2097152 based on the motors encoder resolution which can be 17 bit or 21 bit etc.

Étape 3 - Make a correlation
We need to make a correlation between the 2 values of 100 counts that we want and the 2097152 of the actual motor drive system for the gearing ratio
Étape 4 - Integer value
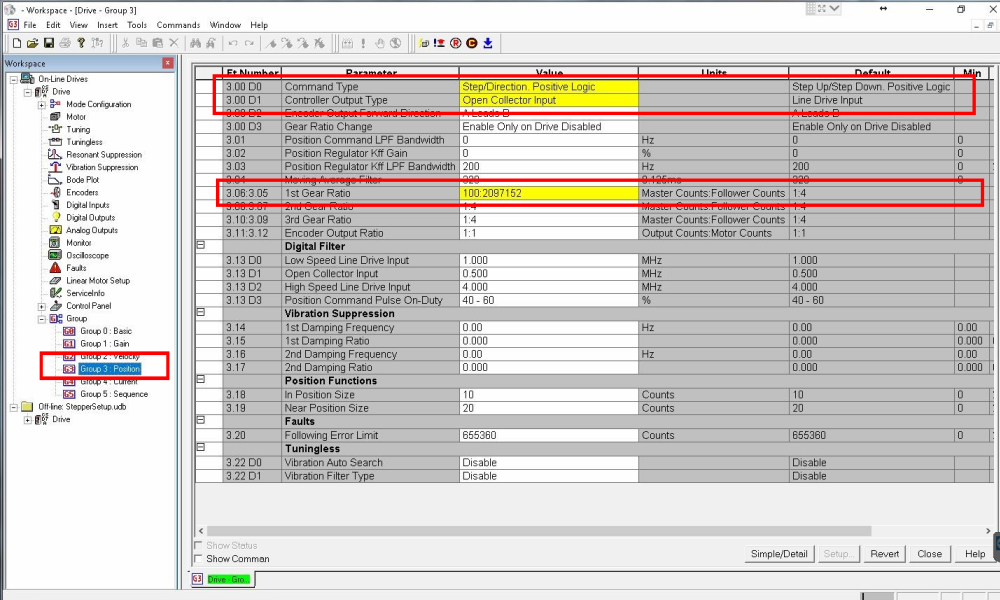
Because we need an integer value (no Decimal values) we can change the 1st Gear Ratio to allow this instead of a 1:2091.52 ratio which is not allowed in the software we change it to 100:2097152 to account for the 0.52 decimal.
Therefore we calculate a ratio of these figures as and download them into the drive:- (see image)
Étape 5 - Completes the RS Automation Drive setup
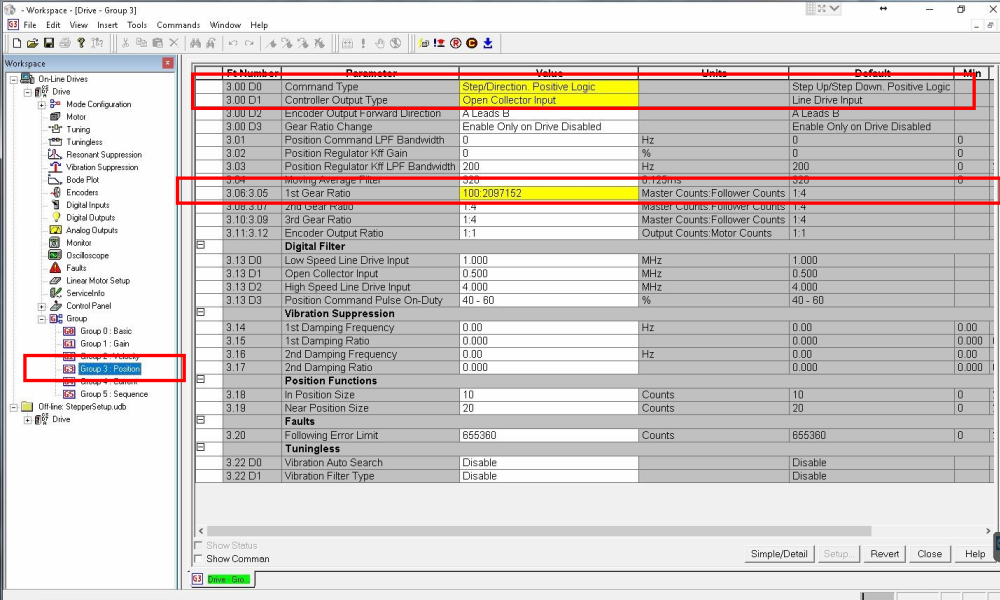
As you can see we have inserted these figures into the drive shown in the picture above. Also take note that we have also set the command line to accept “Step/Direction in Positive Logic” and told the drive what output from the host controller to expect in this case “Open Collector Input”
This now completes the RS Automation Drive setup.
Étape 6 - Setup the Host controller (ESB-2)
The following description will be how to now setup the Host controller (ESB-2).
Assuming the “ScaleFactor” in the host controller is set to 1 if we commanded the motor to move 400 counts the motor will now complete 1 revolution.
However 400 counts is an arbitrary figure so it needs converting into a “useful value” in this example we want to use millimetres therefore 1 revolution = 400 counts = pitch of a lead screw (5mm).
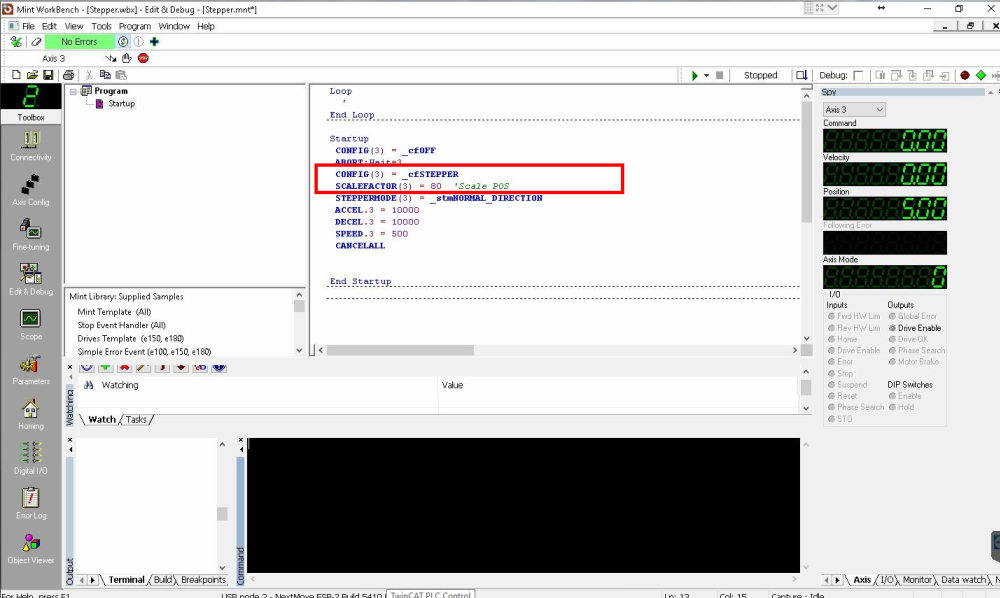
To do this we need to set the “SCALEFACTOR” value in the mint controller software the calculation is as in the image, therefore Scale factor = 80.
Étape 7 -
Now if we command the motor to 5 mm it will rotate a 1 full turn of the motor and the lead screw.
The picture shows the program setup.
Étape 8 -
If you want to convert the value to degrees then the calculation would simply be as in the image
Scale Factor = 1.1111
If we now commanded the motor to move 180 degrees the motor would rotate exactly half a turn.

Étape 9 - NOTE
Take care of any physical gearboxes or gear trains you may have in your system these will need to be accounted for similar to the lead screw example
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português