| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 13 : | Ligne 13 : | ||
{{EPI}} | {{EPI}} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Setup PC</translate> | + | |Step_Title=<translate>Setup Front End PC</translate> |
| − | |Step_Content=<translate>Follow [https://stuga.dokit.app/wiki/TB0409_Setting_Up_Windows_10_PC_2018 technical bulletin 409] to setup PC with correct naming conventions and TeamViewer | + | |Step_Content=<translate>Follow [https://stuga.dokit.app/wiki/TB0409_Setting_Up_Windows_10_PC_2018 technical bulletin 409] to setup PC with correct naming conventions and TeamViewer.</translate> |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Install TwinCAT</translate> | + | |Step_Title=<translate>Setup Back End PC</translate> |
| − | |Step_Content=<translate>Install TwinCAT 3.16 from the mainserver (G:\Design\TwinCAT3\TC31-Full-Setup.3.1.4022.16). Go through the wizard and when prompted restart the PC. (2019 PCs will have this)</translate> | + | |Step_Content=<translate>Follow [https://stuga.dokit.app/wiki/TB0451_CX5120_Beckhoff_PC_Setup TB0451] to set up the Beckhoff PC |
| + | |||
| + | <br /></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Install TwinCAT if Required</translate> | ||
| + | |Step_Content=<translate>{{Info|...All Netmatters CNC machines will have TwinCAT already installed, so you can normally skip this step}} | ||
| + | |||
| + | |||
| + | Install TwinCAT 3.16 from the mainserver (G:\Design\TwinCAT3\TC31-Full-Setup.3.1.4022.16). Go through the wizard and when prompted restart the PC. (2019 PCs will have this)</translate> | ||
|Step_Picture_00=TB0422_Commissioning_ZX5_Software_2018_1d0422_Commissioning_ZX5_Software_2018.jpg | |Step_Picture_00=TB0422_Commissioning_ZX5_Software_2018_1d0422_Commissioning_ZX5_Software_2018.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Set up a route</translate> | |Step_Title=<translate>Set up a route</translate> | ||
| − | |Step_Content=<translate>Once restarted the TwinCAT icon will appear in the bottom right toolbar. We can now set up a route. Left click | + | |Step_Content=<translate>Once restarted the TwinCAT icon will appear in the bottom right toolbar. We can now set up a route. Left click the TwinCAT icon once. There will be a menu, go to "Route" then "Add Route...". This is where the machine and the program can be linked. Making sure the machine infeed is on and connected to the local network, |
| + | |||
| + | # Press on add in the bottom left of the window (1). | ||
| + | # From here perform a broadcast search (2), this will search for any Beckhoff devices on the network. | ||
| + | # When the machine is found select it (3) | ||
| + | # and press add route (4).</translate> | ||
|Step_Picture_00=TB0422_Commissioning_ZX5_Software_2018_2d0422_Commissioning_ZX5_Software_2018.jpg | |Step_Picture_00=TB0422_Commissioning_ZX5_Software_2018_2d0422_Commissioning_ZX5_Software_2018.jpg | ||
}} | }} | ||
Version du 20 novembre 2019 à 14:06
0422 Commissioning ZX5 Software 2018

Difficulté
Moyen
Durée
30 minute(s)
Sommaire
- 1 Introduction
- 2 Étape 1 - Setup Front End PC
- 3 Étape 2 - Setup Back End PC
- 4 Étape 3 - Install TwinCAT if Required
- 5 Étape 4 - Set up a route
- 6 Étape 5 - Obtain a full visual studio setup
- 7 Étape 6 - Paste the solution
- 8 Étape 7 - Open and rename
- 9 Étape 8 - Update MAC address
- 10 Étape 9 - Select Auto-start boot project
- 11 Étape 10 - Update EtherCAT devices
- 12 Étape 11 - TwinSAFE System
- 13 Étape 12 - Check safety options
- 14 Étape 13 - Check safety
- 15 Étape 14 - Copy serial number
- 16 Étape 15 - Verify Complete Safety Project
- 17 Étape 16 - Verify Complete Safety Project (Hardware Level)
- 18 Étape 17 - Download Safety Project
- 19 Étape 18 - TwinSAFE Wizard
- 20 Étape 19 - Press Safety Goggles Icon
- 21 Étape 20 - Log on to the machine int c3Multi and PLCreset
- 22 Étape 21 - See TB0371 for all parameters that need change
- 23 Étape 22 - Troubleshoot
- 24 Étape 23 - Troubleshoot (2)
- 25 Commentaires
Introduction
The first step in commissioning a new machine is to get the basic software setup correctly installed. Because the software is designed to be very flexible across many machine types, the simplest way to do this is to copy from a recently built similar machine.
Étape 1 - Setup Front End PC
Follow technical bulletin 409 to setup PC with correct naming conventions and TeamViewer.
Étape 3 - Install TwinCAT if Required
Install TwinCAT 3.16 from the mainserver (G:\Design\TwinCAT3\TC31-Full-Setup.3.1.4022.16). Go through the wizard and when prompted restart the PC. (2019 PCs will have this)
Étape 4 - Set up a route
Once restarted the TwinCAT icon will appear in the bottom right toolbar. We can now set up a route. Left click the TwinCAT icon once. There will be a menu, go to "Route" then "Add Route...". This is where the machine and the program can be linked. Making sure the machine infeed is on and connected to the local network,
- Press on add in the bottom left of the window (1).
- From here perform a broadcast search (2), this will search for any Beckhoff devices on the network.
- When the machine is found select it (3)
- and press add route (4).

Étape 5 - Obtain a full visual studio setup
Obtain a full visual studio setup from a recent machine of the SAME HANDING. This can be archived by looking at the customer folder and selecting their back up folder. From 2019 ZX5s are sent out with diagnostic PC’s. If a previous build of the same handling has one of these, TeamViewer in and copy the live version of the Visual Studio project. Most recent version of the project will be found in C:/TwinCAT/Stuga.
Étape 6 - Paste the solution
Paste the solution on the ZX5 front end PC in C:/TwinCAT/Stuga.
Étape 7 - Open and rename
Open Solution and...
1: rename the solution to the current build (i.e. Z067).
2: rename the project to the current build.

Étape 8 - Update MAC address
Device MAC Addresses, Device 4 > Adapter > select OS (NDIS) > Search > EtherCAT. This should automatically update the mac address. And the other device. Device 1 > Adapter > PIC > Search > BUS.

Étape 9 - Select Auto-start boot project
Select Auto-start boot project. This can be found under PLC > PLC_Reset_1_1 and PLC > tc3Multi_6_24


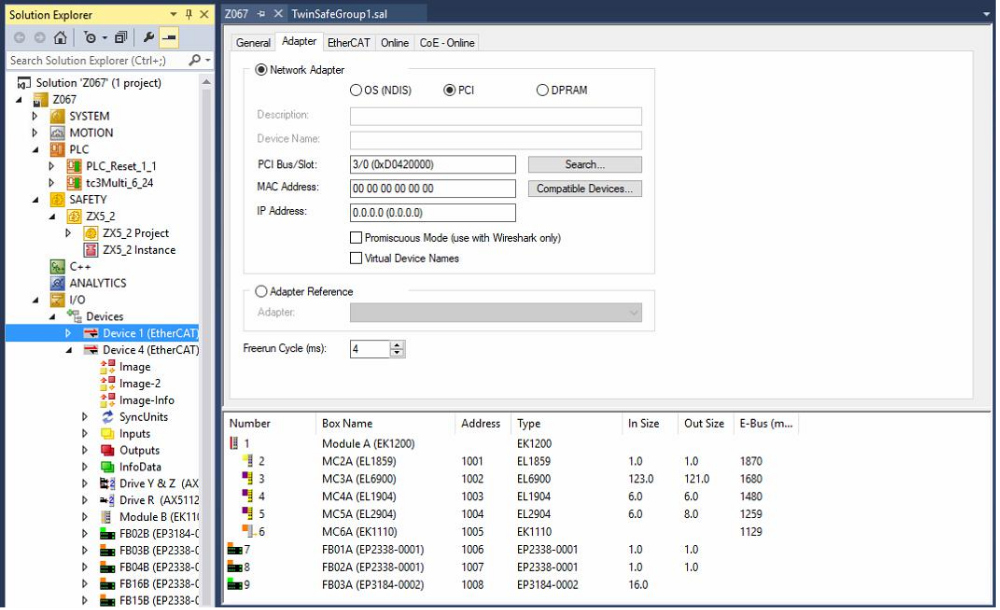
Étape 10 - Update EtherCAT devices
Update EtherCAT devices. This compares the solution’s EtherCAT boxes to the ones on the current build. Any differences between the current solution and the current build will be highlighted and explained by the system. Issues highlighted in RED are completely different to what the solution would expect. Issues highlighted in BLUE are ok, this suggests that a new version of hardware is being used but is compatible with the solution.
To do this right click on the target device and press “Scan”.
NOTE: If this does not work, repeat steps, save changes and online reset (Right click device x).
Étape 11 - TwinSAFE System
AmsNetID the same on SYSTEM > Routes > “Target net ID”, must be the same as: SAFETY > ZX5_2_1 > ZX5_2_1 Project > Target System (Figure 1).

Étape 12 - Check safety options
To get the safety toolbar go to: View > Toolbars > Check TwinCAT Safety. This will show the safety options.
Étape 13 - Check safety
Go to: SAFETY > ZX5_2_1 > ZX5_2_1 Project > Target System. Press the refresh button to update the AmsNetID as it will currently have the ID if the machine that the software was copied from.
Étape 14 - Copy serial number
Copy the serial number (Figure 2). (Used in step 17)


Étape 15 - Verify Complete Safety Project
After this Verify Complete Safety Project (Figure 3)
Étape 16 - Verify Complete Safety Project (Hardware Level)
Then Verify Complete Safety Project (Hardware Level) (Figure 3)
Étape 17 - Download Safety Project
Then Download Safety Project (Figure 3)
Étape 18 - TwinSAFE Wizard
TwinSAFE Wizard: When prompted input, username: Administrator, Serial Number: (Copied from step 13), Password: TwinSAFE. Then confirm.
Étape 19 - Press Safety Goggles Icon
Go to SAFETY > ZX5_2_1 > ZX5_2_1 Project > TwinSafeGroup1 > TwinSafeGroup1.sal, and press the Safety Goggles Icon (Figure 3). This should show the Estop circuit in green if working correctly.
Étape 20 - Log on to the machine int c3Multi and PLCreset
Make sure to log onto the machine in tc3Multi AND PLCreset (Figure 4).

Étape 21 - See TB0371 for all parameters that need change
Please see TB0371 for all parameters than need change.
Étape 22 - Troubleshoot
Scanning for devices: not able to copy revision.
Click on Extended Information, check to see if the hardware revision is lower than the one on the software. If so you may need to change this EtherCAT box out.
Étape 23 - Troubleshoot (2)
TwinSafe Error referencing dip switches. This is regarding the physical switches inside the beckhoff drives. This error will not allow you to complete the full TwinSAFE procedure.
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português