Fitting the crank upgrade to Z065, Z066, Z067


Difficulté
Difficile
Durée
2 jour(s)
Sommaire
- 1 Introduction
- 2 Étape 1 - Program Eaton Drives before they leave
- 3 Étape 2 - Remove Link arm connecting to rack and pinion
- 4 Étape 3 - Remove pivot shaft and arm
- 5 Étape 4 - Undo clutch and remove Cam
- 6 Étape 5 - Add sprocket to clutch
- 7 Étape 6 - Fix idler plate to upright
- 8 Étape 7 - Fix split sprocket onto drive shaft
- 9 Étape 8 - Drill and pin split sprocket to shaft
- 10 Étape 9 - Add chain minimum length sprocket to sprocket
- 11 Étape 10 - Fit Module C Crank Home sensor plate to Arm 5
- 12 Étape 11 - Fit Module C Crank Out sensor plate to Arm 5
- 13 Étape 12 - Fit Module D Crank Home sensor plate to Arm 5
- 14 Étape 13 - Fit Module D Crank Out sensor plate to Arm 5
- 15 Étape 14 - Fit Module E Crank Out sensor plate to Arm 5
- 16 Étape 15 - Fit Module E Crank Home sensor plate to Arm 5
- 17 Étape 16 - Remove 2 off breaker and contactor Module C
- 18 Étape 17 - Add 2 off single pole breaker Module C
- 19 Étape 18 - Add 2 off Eaton Drive to Module C
- 20 Étape 19 - Add single pole breaker Module E
- 21 Étape 20 - Remove breaker and contactor Module E
- 22 Étape 21 - Add 1 Off Eaton drive to Module E
- 23 Étape 22 - For each Eaton Drive
- 24 Étape 23 - Wire Sensor Cables to EtherCAT boxes
- 25 Étape 24 - Latest Front End software installed
- 26 Étape 25 - Map new Links
- 27 Étape 26 - Activate Configuration
- 28 Étape 27 - Add new IO Refs to IODef.mul
- 29 Étape 28 - Latest Front End software installed
- 30 Étape 29 - Test Function
- 31 Commentaires
Introduction
This upgrade replaces the crank arm assemblies on Z065, Z066 and Z067 with a direct drive system to improve reliability
Étape 1 - Program Eaton Drives before they leave
Running frequency
Control mode
Accel time
Decel time
Étape 2 - Remove Link arm connecting to rack and pinion
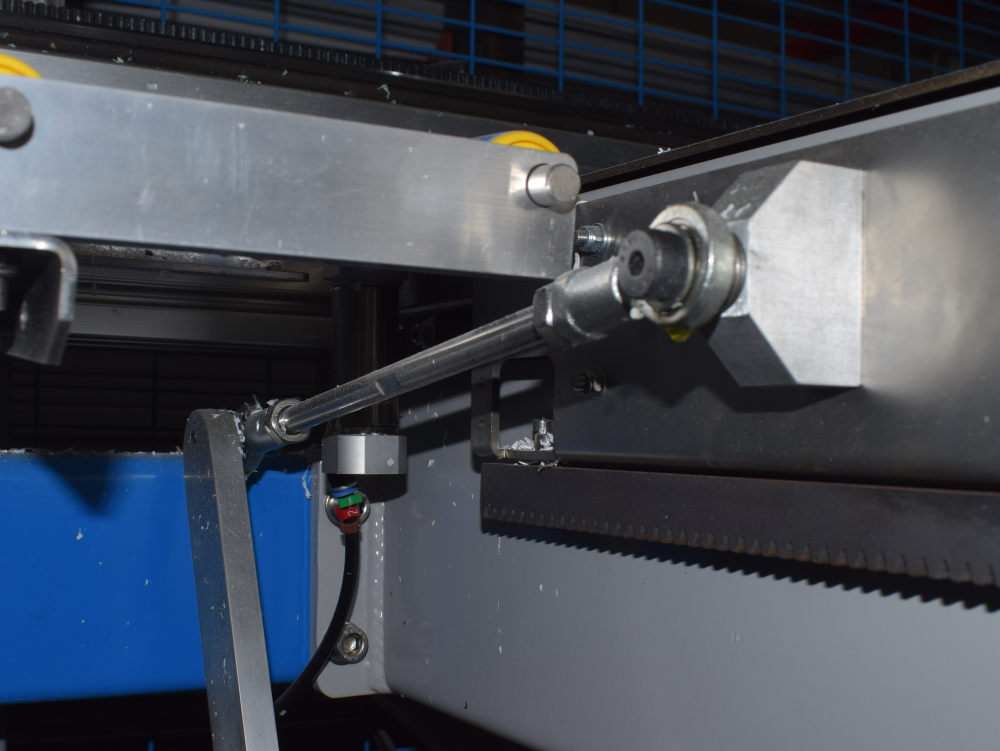
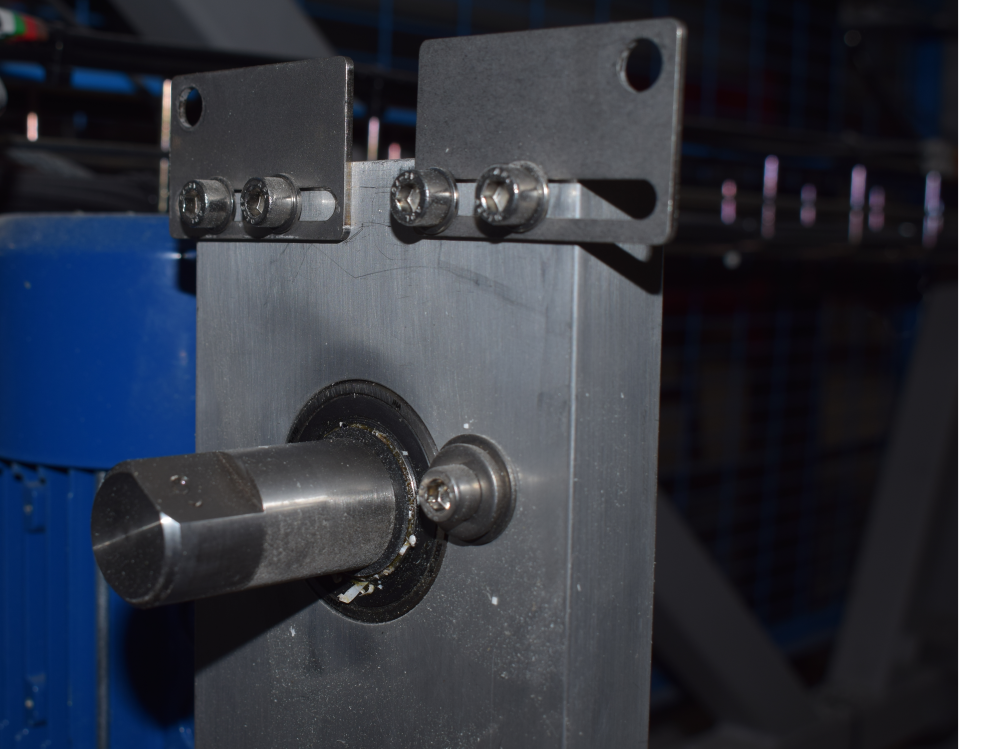
Étape 3 - Remove pivot shaft and arm



Étape 4 - Undo clutch and remove Cam



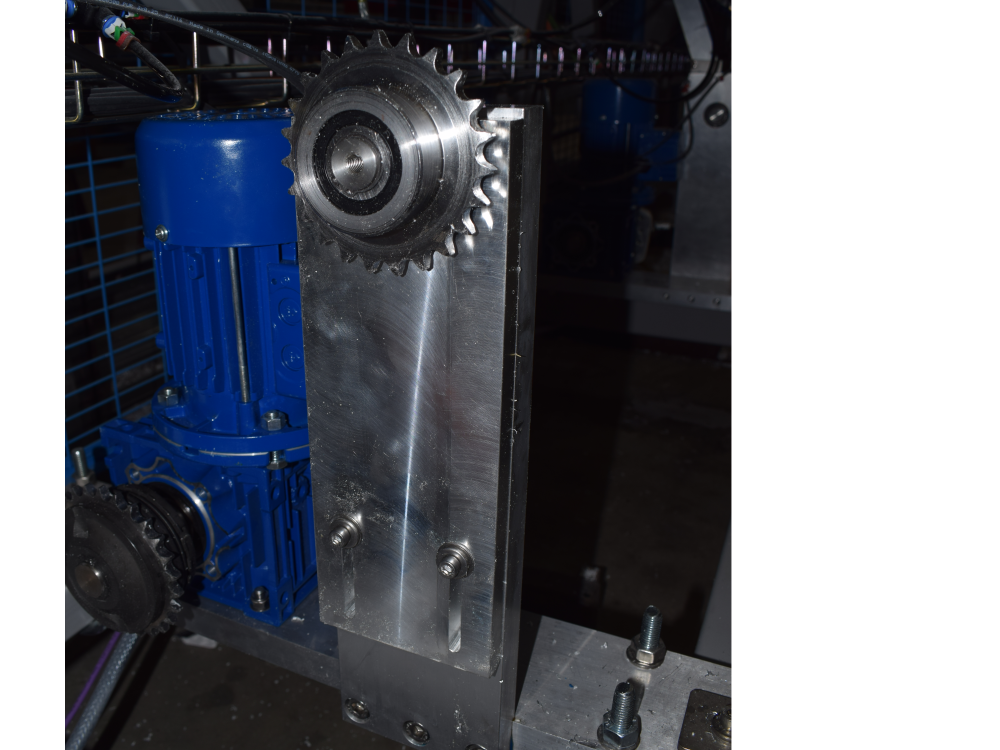
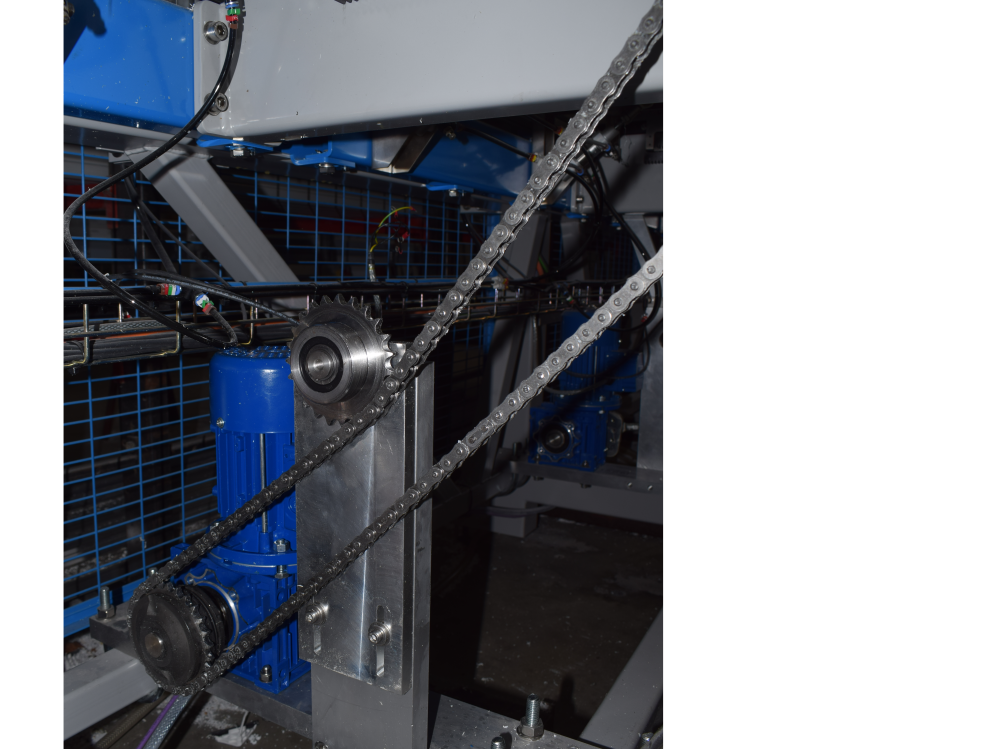
Étape 5 - Add sprocket to clutch
B0001166



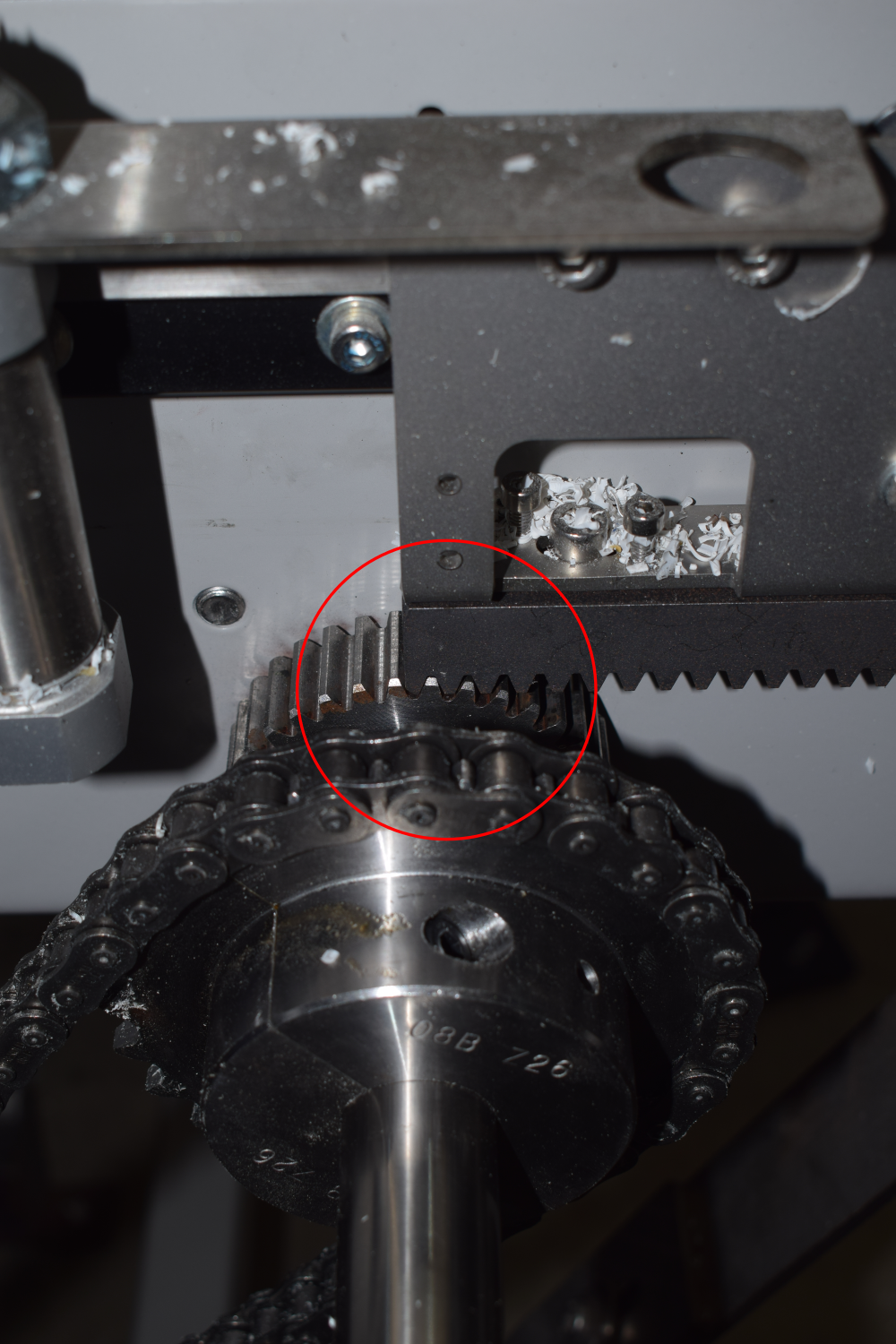
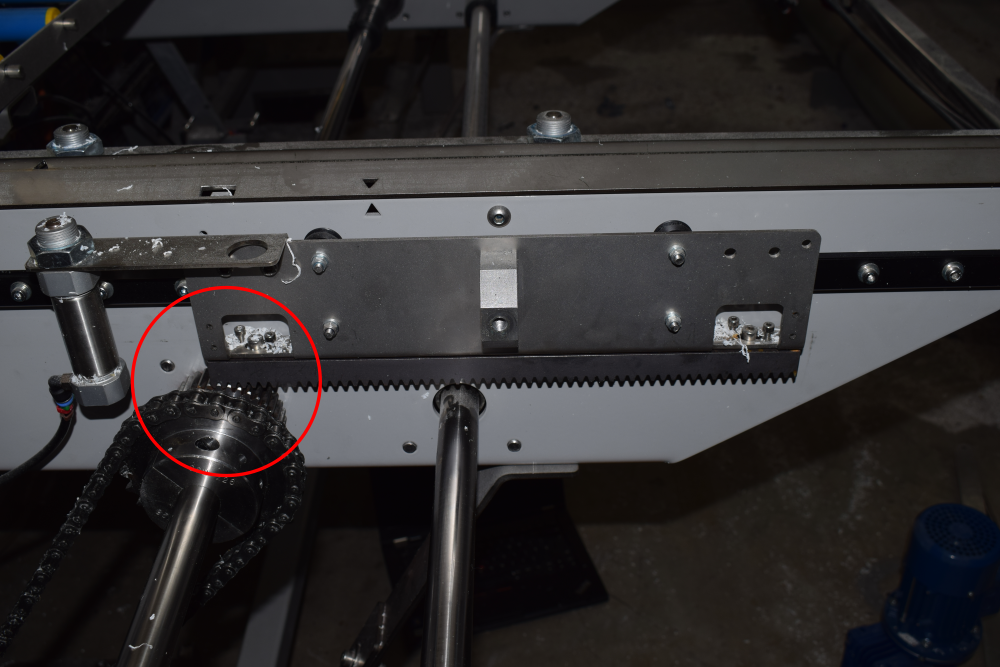
Étape 6 - Fix idler plate to upright

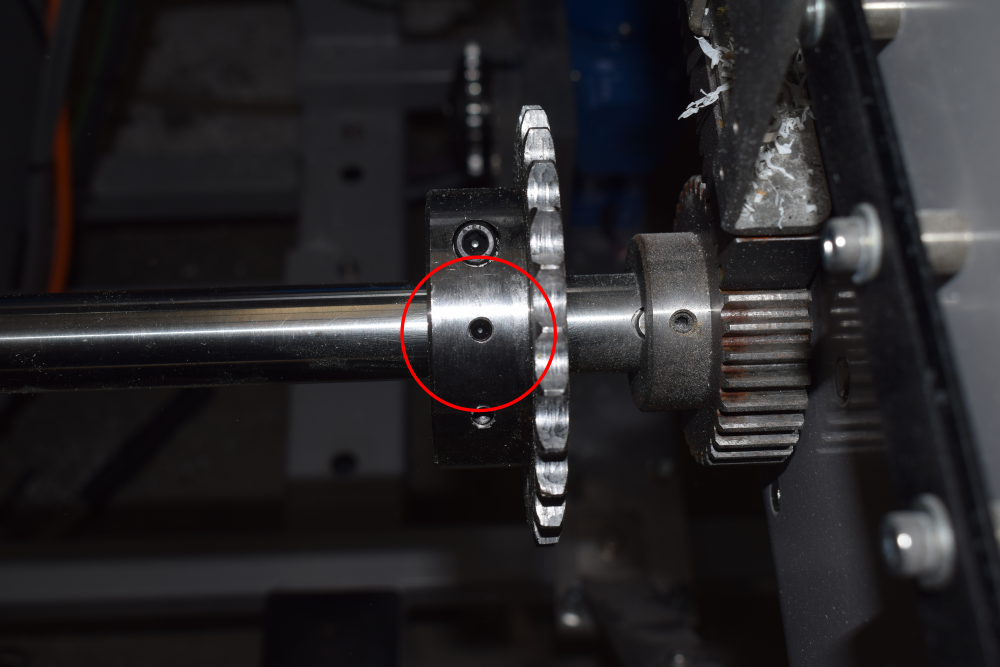
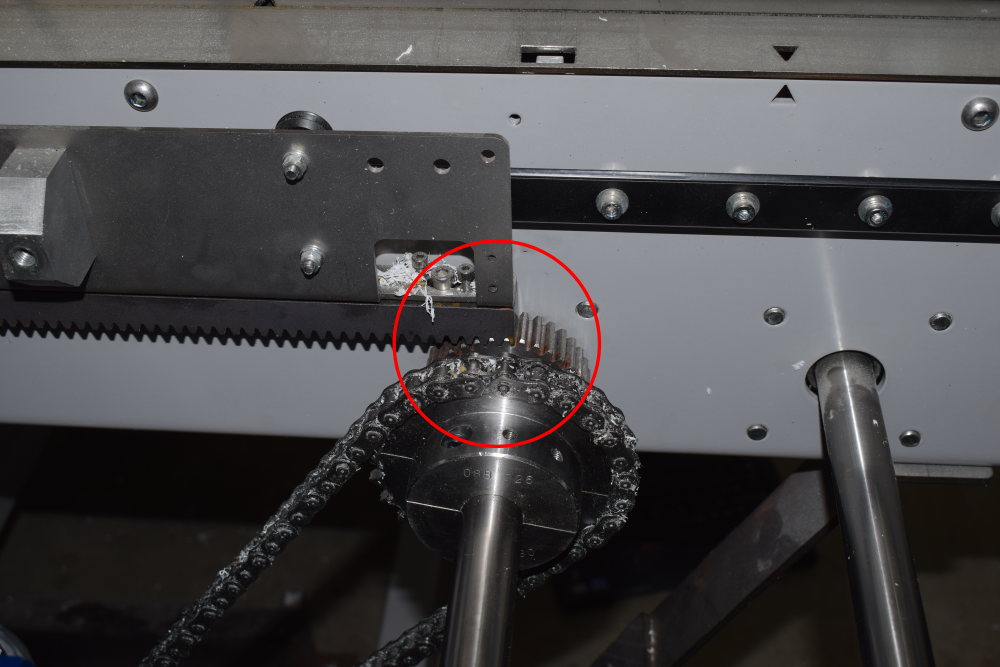
Étape 7 - Fix split sprocket onto drive shaft


Étape 8 - Drill and pin split sprocket to shaft
Étape 9 - Add chain minimum length sprocket to sprocket
Use idler to create tension
Étape 10 - Fit Module C Crank Home sensor plate to Arm 5
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes


Étape 11 - Fit Module C Crank Out sensor plate to Arm 5
This one has an extension that may or not be required. See Module D Crank Out Sensor for more info.
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes

Étape 12 - Fit Module D Crank Home sensor plate to Arm 5
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes

Étape 13 - Fit Module D Crank Out sensor plate to Arm 5
This one has an extension
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes




Étape 14 - Fit Module E Crank Out sensor plate to Arm 5
Sensor cables run to rear Module E cabinet - EtherCAT fieldbus boxes


Étape 15 - Fit Module E Crank Home sensor plate to Arm 5
This one has an extension
Sensor cables run to rear Module E cabinet - EtherCAT fieldbus boxes



Étape 16 - Remove 2 off breaker and contactor Module C


Étape 17 - Add 2 off single pole breaker Module C
Tidy wires away for the spare 2 phases
Étape 18 - Add 2 off Eaton Drive to Module C
May need to move trunking or mount directly to side of enclosure.
Étape 19 - Add single pole breaker Module E
Étape 20 - Remove breaker and contactor Module E
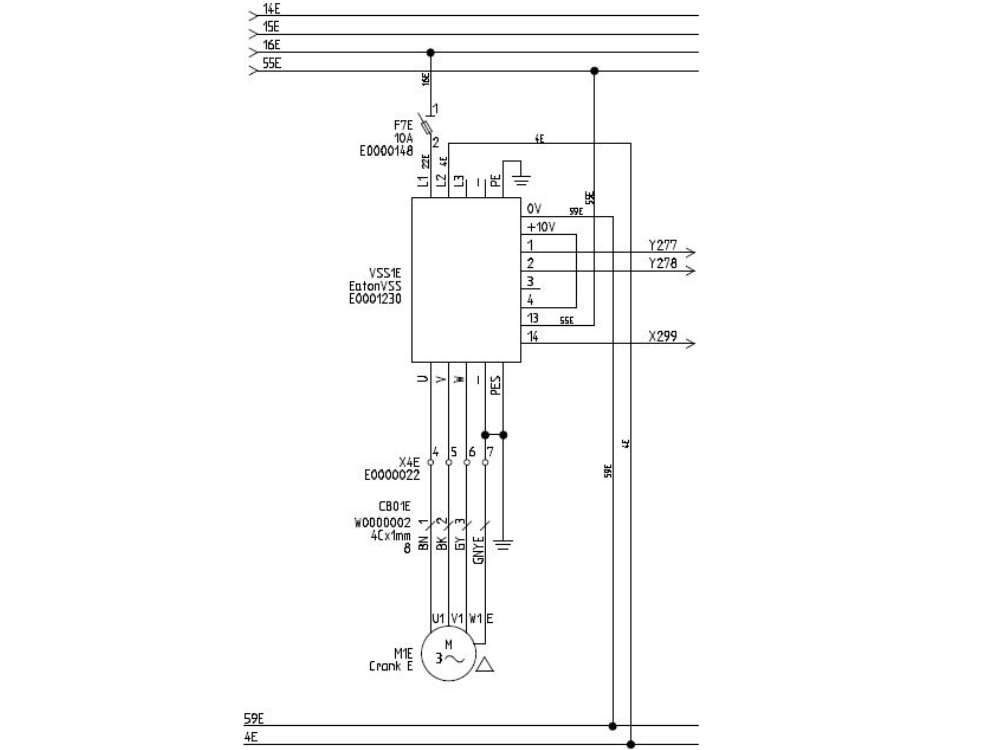
Étape 21 - Add 1 Off Eaton drive to Module E
Étape 22 - For each Eaton Drive
- 1 phase
- Neutral
- Earth
- Fwd and Reverse signals
- Wire motor cables directly to bottom of drives
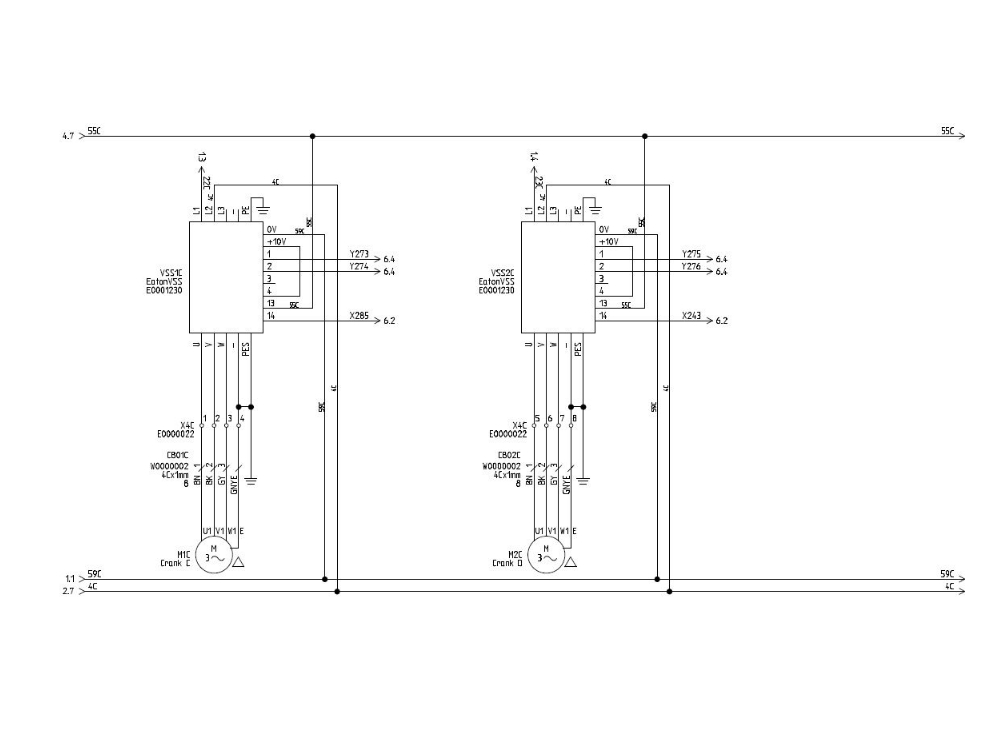
Étape 23 - Wire Sensor Cables to EtherCAT boxes
Module C and D cranks to back of Module C cabinet
Module E crank to back of Module E cabinet


Étape 24 - Latest Front End software installed
- Backup Old multi folder
- Copy in new winMulti version to c:\multi overwriting what is there




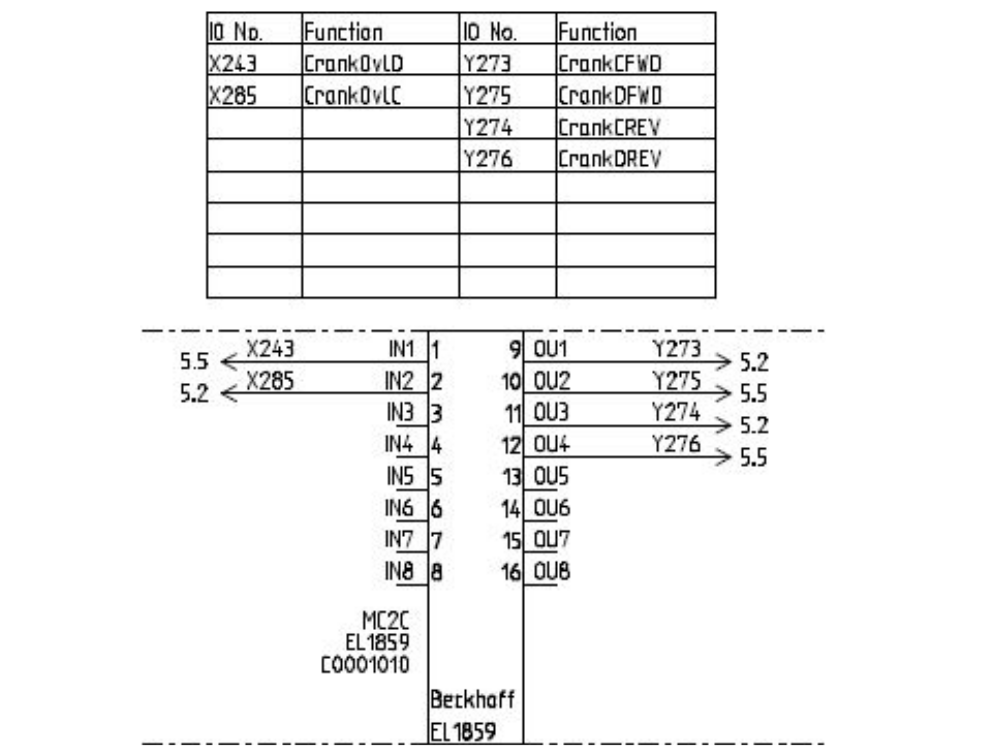
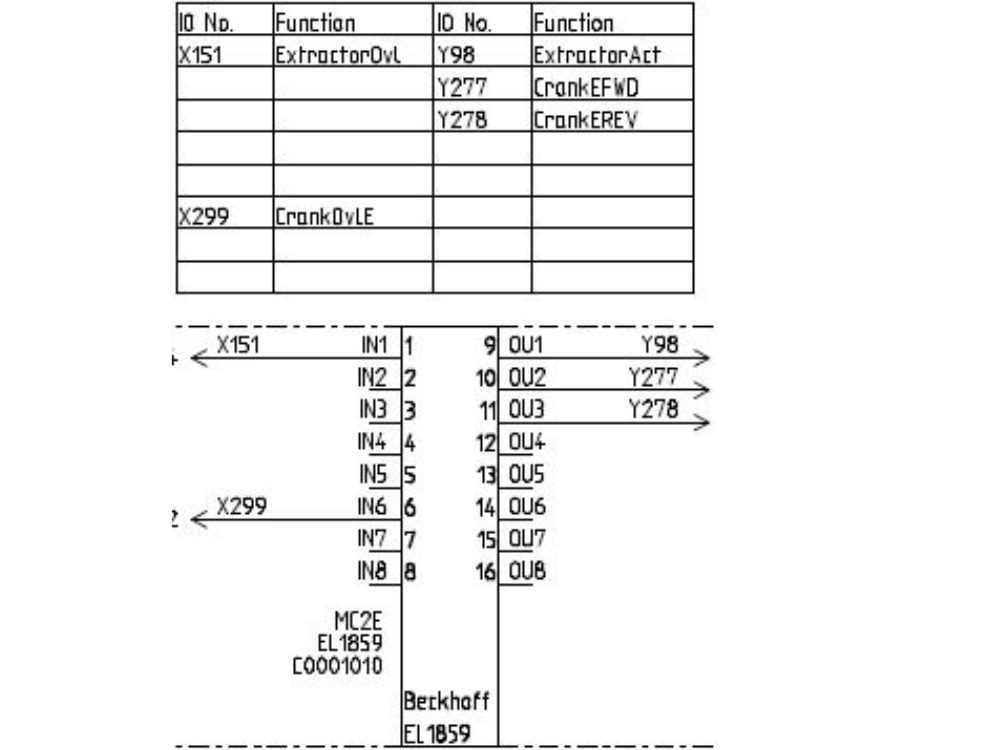
Étape 25 - Map new Links
Overwrite existing links if any exist
| Output Ref | Name | EtherCAT Slice | Channel |
|---|---|---|---|
| 273 | Crank C Fwd | MC2C | 9 |
| 275 | Crank D Fwd | MC2C | 10 |
| 274 | Crank C Rev | MC2C | 11 |
| 276 | Crank D Rev | MC2C | 12 |
| 277 | Crank E Fwd | MC2E | 10 |
| 278 | Crank E Rev | MC2E | 11 |

Étape 26 - Activate Configuration
And restart in run mode when prompted
Étape 27 - Add new IO Refs to IODef.mul
Ask HQ to download a relevant IODef.mul file
OuC_CrankFWD,273,2,0,0,False,False,3,8,-,False,0
OuC_CrankREV,274,2,0,0,False,False,3,9,-,False,0
OuD_CrankFWD,275,2,0,0,False,False,3,10,-,False,0
OuD_CrankREV,276,2,0,0,False,False,3,11,-,False,0
OuE_CrankFWD,277,2,0,0,False,True,64,0,-,False,0
OuE_CrankREV,278,2,0,0,False,True,64,1,-,False,0
And these removed
Étape 28 - Latest Front End software installed
- Backup Old multi folder
- Copy in new winMulti version to c:\multi overwriting what is there
Étape 29 - Test Function
Key Pointers
- End stops should be set so the rack can never run off the pinion - always a full tooth engaged
- Each crank motion stops when the input is seen, and then decelerates. Therefore, set the crank input position to allow for this deceleration before hitting end stop. Normally about 30mm
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português