| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| + | |Main_Picture=Stuertz_Conveyor_Motor_and_Indexing_Setup_Screenshot_2023-01-30_194735.jpg | ||
| + | |Main_Picture_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":-1,"top":-2,"width":897,"height":691,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.67,"scaleY":0.67,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/b/b9/Stuertz_Conveyor_Motor_and_Indexing_Setup_Screenshot_2023-01-30_194735.jpg","filters":[]}],"height":450.2369668246445,"width":600} | ||
|Description=<translate>Correct setting and adjustment of the Stuertz Conveyor and Indexing System</translate> | |Description=<translate>Correct setting and adjustment of the Stuertz Conveyor and Indexing System</translate> | ||
|Categories=Maintenance | |Categories=Maintenance | ||
|Tags=Index | |Tags=Index | ||
}} | }} | ||
| − | <translate> | + | <translate>{{#annotatedImageLight:Fichier:Stuertz Conveyor Motor and Indexing Setup Both Sensors.jpg|0=945px|hash=f66005d96f468ba14da74e9a877fe908|jsondata={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":945,"height":544,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/d/d5/Stuertz_Conveyor_Motor_and_Indexing_Setup_Both_Sensors.jpg","filters":[]},{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":238,"top":391,"width":84.46,"height":48.82,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"INDEX SENSOR","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} },{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":761,"top":88,"width":84.46,"height":48.82,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"BRAKE SENSOR","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} },{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":120,"top":120,"width":48.93,"height":22.6,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} },{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":793,"top":375,"width":61.12,"height":48.82,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"INDEX ARM","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} },{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":651.5,"top":118.5,"width":141,"height":55,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":70.5,"x2":-70.5,"y1":-27.5,"y2":27.5,"x2a":-48.96013525669507,"y2a":27.68500497325538,"x2b":-54.77457727329272,"y2b":12.778889985250494},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":722,"top":91,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":581,"top":146,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":301,"top":337.5,"width":56,"height":77,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-28,"x2":28,"y1":38.5,"y2":-38.5,"x2a":22.706454720924587,"y2a":-17.61990473253586,"x2b":9.76667737207357,"y2b":-27.0306518953366},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":273,"top":376,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":329,"top":299,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":700,"top":380,"width":102,"height":16,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":51,"x2":-51,"y1":-8,"y2":8,"x2a":-30.00186732147378,"y2a":12.80400083420157,"x2b":-32.481351622997174,"y2b":-3.0027115880100474},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":751,"top":372,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":649,"top":388,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":555.5,"top":300,"width":1,"height":116,"fill":"rgba(255,0,0,0)","stroke":"#0054FF","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-0.5,"x2":0.5,"y1":58,"y2":-58,"x2a":8.327295364523408,"y2a":-37.93178016672854,"x2b":-7.672110138290959,"y2b":-38.069706076235555},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":555,"top":358,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":556,"top":242,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":544,"width":945}|mediaClass=Image|type=frameless|align=center|src=/images/thumb/d/d5/Stuertz_Conveyor_Motor_and_Indexing_Setup_Both_Sensors.jpg/ia-f66005d96f468ba14da74e9a877fe908-px-Stuertz_Conveyor_Motor_and_Indexing_Setup_Both_Sensors.jpg.png|href=./Fichier:Stuertz Conveyor Motor and Indexing Setup Both Sensors.jpg|resource=./Fichier:Stuertz Conveyor Motor and Indexing Setup Both Sensors.jpg|caption=|size=945px}}<br /> |
| − | + | = General Sequence of Operation = | |
| − | + | * On a start signal, release motor mechanical brake, start motor | |
| + | * Wait until INDEX and BRAKE sensors are inactive | ||
| + | * Wait for BRAKE sensor active | ||
| + | * Decelerate motor | ||
| + | * Ensure INDEX sensor is covered | ||
| + | * Apply Mechanical Brake | ||
| + | {{Info|...Indexer works on one revolution of motor / gearbox is exactly one index on the conveyor belt}}<br /> | ||
| + | = General Setup Procedure = | ||
| − | Use the advance button to move to index one position | + | # Program the inverter to run forwards and backwards at 50Hz, 0.5s acceleration and deceleration |
| + | # Use the advance button to move to index one position / index | ||
| + | # Check that the INDEX sensor is covered on deceleration - adjust the INDEX on the arc so that this is the case | ||
| + | # Measure the position of the index to the backfence - this should be 130mm. | ||
| + | # Adjust the position by loosening the Allen key fastening on the INDEX ARM. Rotate up at the rear to move the index closer to the backfence (Arrow shown in blue). Remember, one revolution is one index pulse length (150mm) | ||
| − | + | =IO on Autoflow Mk4 Infeed Table= | |
| − | + | {{#annotatedImageLight:Fichier:Stuertz Conveyor Motor and Indexing Setup Screenshot 2023-01-30 194253.jpg|0=482px|hash=8a6c1b57748175c1a72b4c47a71b77b5|jsondata={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":484,"height":394,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/a/a5/Stuertz_Conveyor_Motor_and_Indexing_Setup_Screenshot_2023-01-30_194253.jpg","filters":[]},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":242.28,"top":332.69,"width":445.43,"height":38.5,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0}],"height":392,"width":482}|mediaClass=Image|type=frameless|alt=Stuertz Conveyor Motor and Indexing Setup IO 2.png|align=center|src=/images/thumb/a/a5/Stuertz_Conveyor_Motor_and_Indexing_Setup_Screenshot_2023-01-30_194253.jpg/ia-8a6c1b57748175c1a72b4c47a71b77b5-px-Stuertz_Conveyor_Motor_and_Indexing_Setup_Screenshot_2023-01-30_194253.jpg.png|href=./Fichier:Stuertz Conveyor Motor and Indexing Setup Screenshot 2023-01-30 194253.jpg|resource=./Fichier:Stuertz Conveyor Motor and Indexing Setup Screenshot 2023-01-30 194253.jpg|caption=|size=482px}}<br /> | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | {{#annotatedImageLight:Fichier:Stuertz Conveyor Motor and Indexing Setup | ||
{| class="wikitable" | {| class="wikitable" | ||
|+Infeed Setup Functionality | |+Infeed Setup Functionality | ||
| Ligne 45 : | Ligne 52 : | ||
|X388 | |X388 | ||
|InA_CnvBrk | |InA_CnvBrk | ||
| − | |Sensor | + | |Sensor to trigger deceleration |
|This sensor tells the motor when to decelerate to stop the profile close to the loading position. {{Info|...Generally, a deceleration on the motor will cause this position to overrun}}<br /> | |This sensor tells the motor when to decelerate to stop the profile close to the loading position. {{Info|...Generally, a deceleration on the motor will cause this position to overrun}}<br /> | ||
| + | |- | ||
| + | |X033 | ||
| + | |InA_Index | ||
| + | |Sensor to identify that conveyor is in position | ||
| + | | | ||
|}</translate> | |}</translate> | ||
{{PageLang | {{PageLang | ||
Version du 30 janvier 2023 à 22:06
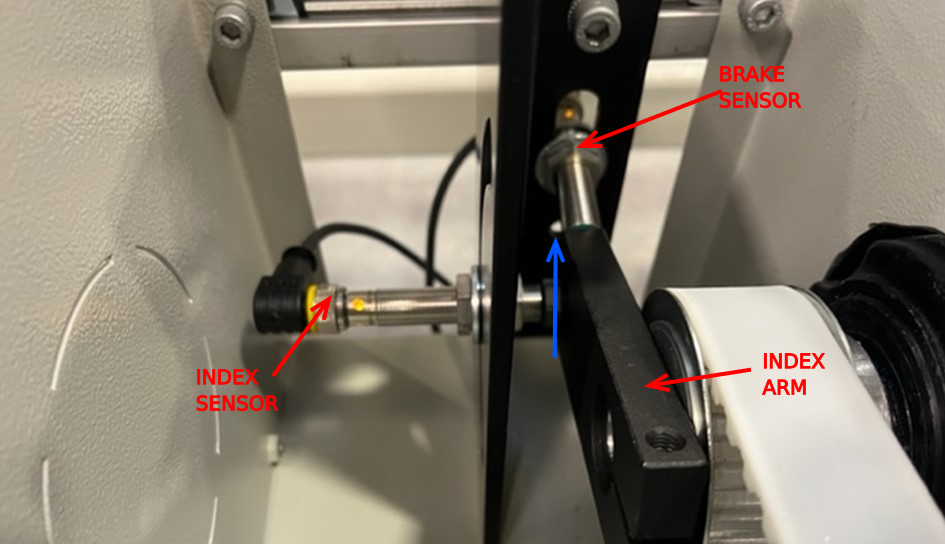
Correct setting and adjustment of the Stuertz Conveyor and Indexing System


General Sequence of Operation
- On a start signal, release motor mechanical brake, start motor
- Wait until INDEX and BRAKE sensors are inactive
- Wait for BRAKE sensor active
- Decelerate motor
- Ensure INDEX sensor is covered
- Apply Mechanical Brake
General Setup Procedure
- Program the inverter to run forwards and backwards at 50Hz, 0.5s acceleration and deceleration
- Use the advance button to move to index one position / index
- Check that the INDEX sensor is covered on deceleration - adjust the INDEX on the arc so that this is the case
- Measure the position of the index to the backfence - this should be 130mm.
- Adjust the position by loosening the Allen key fastening on the INDEX ARM. Rotate up at the rear to move the index closer to the backfence (Arrow shown in blue). Remember, one revolution is one index pulse length (150mm)
IO on Autoflow Mk4 Infeed Table

| IORef | Reference Code | Function | Notes |
|---|---|---|---|
| Y109 | OuA_IMotFwd | Rotate Forwards | Forwards means belts should take the profile from the operator towards the backfence |
| Y110 | OuA_IMotRev | Rotate Reverse | Belts rotated in reverse |
| Y382 | OuA_IMotBrake | Motor Brake | Motors have a brake function white needs to be ACTIVE / ON to release the brake |
| X388 | InA_CnvBrk | Sensor to trigger deceleration | This sensor tells the motor when to decelerate to stop the profile close to the loading position. |
| X033 | InA_Index | Sensor to identify that conveyor is in position |
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português