| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 38 : | Ligne 38 : | ||
Adjust the sensor so that the laser point is on the gripper body</translate> | Adjust the sensor so that the laser point is on the gripper body</translate> | ||
| − | |||
| − | |||
| − | |||
| − | |||
}} | }} | ||
{{Materials}} | {{Materials}} | ||
| Ligne 48 : | Ligne 44 : | ||
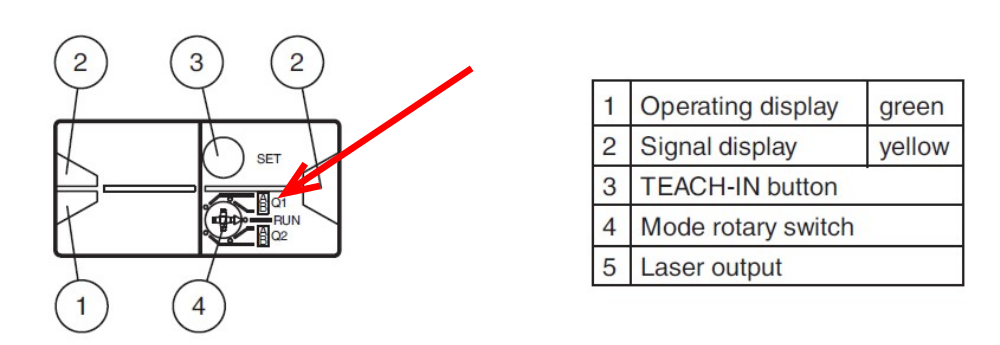
|Step_Title=<translate>Select Rotary switch</translate> | |Step_Title=<translate>Select Rotary switch</translate> | ||
|Step_Content=<translate>Select Q1</translate> | |Step_Content=<translate>Select Q1</translate> | ||
| − | + | |Step_Picture_00=X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg | |
| − | + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":846,"height":292,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.71,"scaleY":0.71,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/f/f0/X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":227,"top":78.5,"width":112,"height":75,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":56,"x2":-56,"y1":-37.5,"y2":37.5,"x2a":-34.93056801240676,"y2a":33.019036295596365,"x2b":-43.83314490857291,"y2b":19.72452146398824},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":283,"top":41,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":171,"top":116,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":207,"width":600} | |
| − | | | ||
| − | | | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 58 : | Ligne 52 : | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
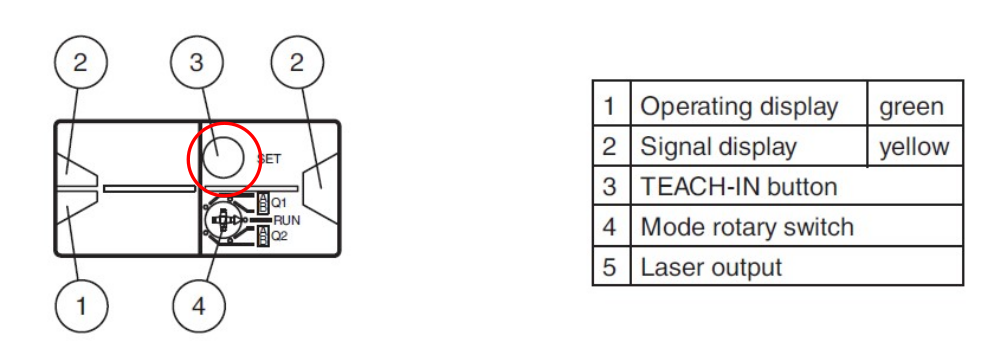
| − | |Step_Title=<translate>Set A | + | |Step_Title=<translate>Set A threshold</translate> |
| − | |Step_Content=<translate></translate> | + | |Step_Content=<translate>Temporarily stick and object of 20-40mm thiockness in front to the laser dot |
| + | |||
| + | {{Info|...This shortens the laser distance to give us an "off threshold"}}<br /> | ||
| + | |||
| + | * To store a switching threshold (distance measured value), press and hold the "SET" button until the yellow and green LEDs flash in phase (approx. 2 s). | ||
| + | * Teach-In starts when the "SET" button is released. | ||
| + | * A successful Teach-In is indicated by rapidly alternating flashing (2.5 Hz) of the yellow and green LEDs. | ||
| + | * An unsuccessful Teach-In is indicated by alternating flashing (8 Hz) of the yellow and green LEDs. | ||
| + | |||
| + | <br /></translate> | ||
| + | |Step_Picture_00=X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":846,"height":292,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.71,"scaleY":0.71,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/f/f0/X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":134.72,"top":95.72,"width":43.51,"height":43.51,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":21.755116852413927,"ry":21.755116852413927}],"height":207,"width":600} | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
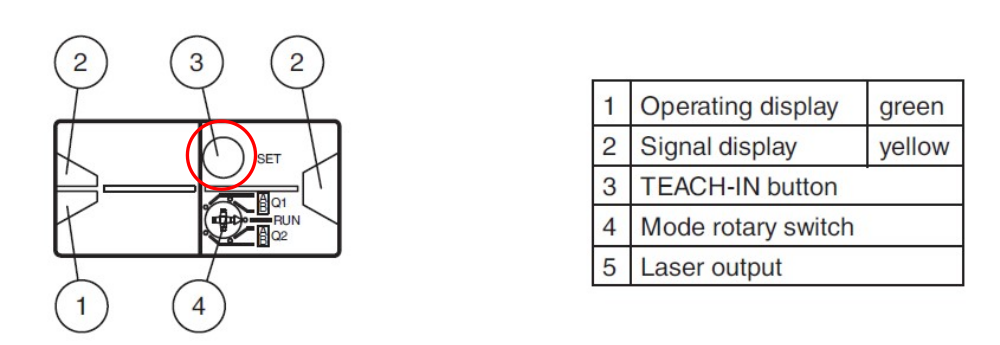
| − | |Step_Title=<translate> | + | |Step_Title=<translate>Set B Threshold</translate> |
| − | |Step_Content=<translate> | + | |Step_Content=<translate>Remove the spacing object and teach-in the B position |
| − | + | <br /> | |
| − | + | * To store a switching threshold (distance measured value), press and hold the "SET" button until the yellow and green LEDs flash in phase (approx. 2 s). | |
| + | * Teach-In starts when the "SET" button is released. | ||
| + | * A successful Teach-In is indicated by rapidly alternating flashing (2.5 Hz) of the yellow and green LEDs. | ||
| + | * An unsuccessful Teach-In is indicated by alternating flashing (8 Hz) of the yellow and green LEDs.</translate> | ||
| + | |Step_Picture_00=X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":846,"height":292,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.71,"scaleY":0.71,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/f/f0/X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":132.89,"top":93.11,"width":40.88,"height":40.88,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":20.44134136540792,"ry":20.44134136540792}],"height":207,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
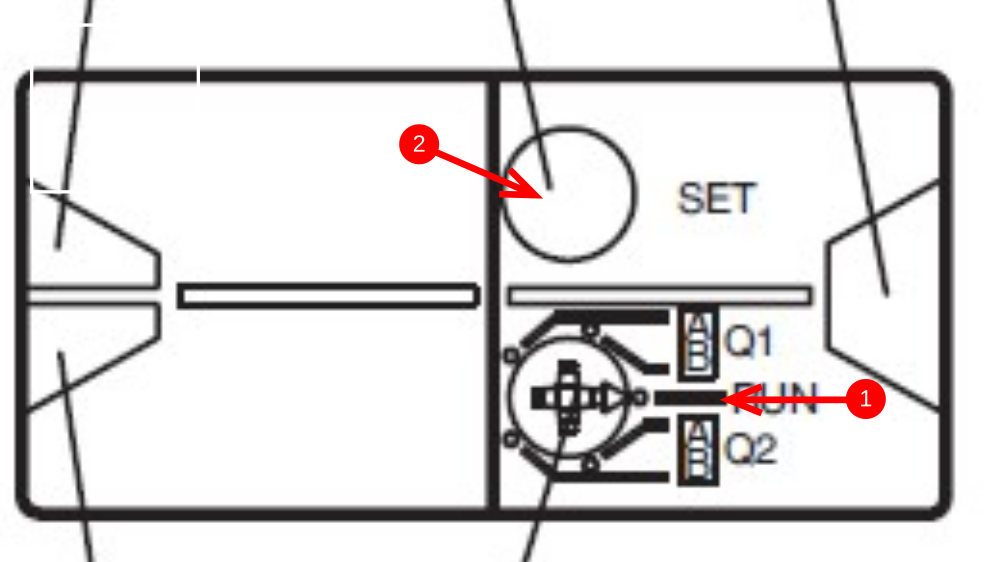
| + | |Step_Title=<translate>If you need to reset default settings</translate> | ||
| + | |Step_Content=<translate># Set the rotary switch to the "RUN" position | ||
| + | # Press and hold the "SET" button until the yellow and green LEDs stop flashing in phase (approx. 10 s) | ||
| + | # If the green LED lights up, the procedure is complete</translate> | ||
| + | |Step_Picture_00=X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":-95,"top":-191,"width":846,"height":292,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":2.31,"scaleY":2.31,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/f/f0/X252_Forward_Clamp_Out_Sensor_Setup_Stuertz_Infeed_Sensor_Diagram.jpg","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":474,"top":239.7,"width":74,"height":0,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":37,"x2":-37,"y1":-0.0013604060693097608,"y2":0.0013604060693097608,"x2a":-16.999705871666034,"y2a":8.000625046030283,"x2b":-17.000294155371282,"y2b":-7.9993749431547885},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":511,"top":239.7,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":437,"top":239.71,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":507,"top":226.7,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"1","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":1},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":287.5,"top":102.47,"width":67,"height":28.93,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-33.5,"x2":33.5,"y1":-14.467350254336786,"y2":14.467350254336786,"x2a":18.310794848765628,"y2a":-0.8064196428992991,"x2b":11.967285995839879,"y2b":13.882348019258497},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":254,"top":88,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":321,"top":116.93,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":239,"top":73.99,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"2","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":2},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":69,"top":65,"width":100,"height":100,"fill":"rgba(255,0,0,0)","stroke":"#FFFFFF","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0}],"height":336.9230769230769,"width":600} | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
Version du 26 janvier 2023 à 12:50
Setting the laser distance sensor for the forward clamp out input (Vorlaufwagen)


Difficulté
Difficile
Durée
10 minute(s)
Introduction
The out sensor used for the vorlaufwagen cannot be a standard reed switch because the cylinder that drives this output is a telescoping version. It is impossible to detect the out position.
Therefore, a sensor is fitted that must be programmed to set a high output when it detects the full range has been reached
The sensor is a Pepperl+Fuchs VDM28-8-L
Datasheet can be downloaded here
Function
The distance measurement device contains one transmitter and one receiver incorporated into a single housing. The transmitter light is reflected back to the receiver from a target. The sensor determines the distance to the target and triggers a switching function or supplies the relevant measured value for processing.
Assembly instructions
The sensor can be mounted by means of through holes or by using a mounting bracket or mounting clamp
Ensure that the surface is level in order to prevent the housing from becoming distorted when the fittings are tightened. It is advisable to secure the nuts and screws using spring washers in order to prevent the sensor from being incorrectly adjusted.
Connection
Connect the device in accordance with the connection diagram in the datasheet.
Adjustment
The green LED lights up when the operating voltage is switched on.
Adjust the sensor so that the laser point is on the gripper bodyÉtape 1 - Select Rotary switch
Select Q1
Étape 2 - Move the Clamp assembly to its out position
Via IO screen
Étape 3 - Set A threshold
Temporarily stick and object of 20-40mm thiockness in front to the laser dot
- To store a switching threshold (distance measured value), press and hold the "SET" button until the yellow and green LEDs flash in phase (approx. 2 s).
- Teach-In starts when the "SET" button is released.
- A successful Teach-In is indicated by rapidly alternating flashing (2.5 Hz) of the yellow and green LEDs.
- An unsuccessful Teach-In is indicated by alternating flashing (8 Hz) of the yellow and green LEDs.
Étape 4 - Set B Threshold
Remove the spacing object and teach-in the B position
- To store a switching threshold (distance measured value), press and hold the "SET" button until the yellow and green LEDs flash in phase (approx. 2 s).
- Teach-In starts when the "SET" button is released.
- A successful Teach-In is indicated by rapidly alternating flashing (2.5 Hz) of the yellow and green LEDs.
- An unsuccessful Teach-In is indicated by alternating flashing (8 Hz) of the yellow and green LEDs.
Étape 5 - If you need to reset default settings
- Set the rotary switch to the "RUN" position
- Press and hold the "SET" button until the yellow and green LEDs stop flashing in phase (approx. 10 s)
- If the green LED lights up, the procedure is complete
Étape 6 - Error messages
• Short circuit: In the event of a short circuit at the sensor output, the green LED flashes with a frequency ofapprox. 4 Hz.
• Teach error: In the event of a teach error, the yellow and green LEDs flash alternately with a frequency of approx. 8 Hz
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português