| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 188 : | Ligne 188 : | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Latest | + | |Step_Title=<translate>Latest Back End Software installed</translate> |
| − | |Step_Content=<translate></translate> | + | |Step_Content=<translate>* Open Visual Studio |
| + | * Update from Target | ||
| + | * Save Solution as Archive with Bnn.yyyy.mm.dd | ||
| + | * Close VS | ||
| + | * Open File Transfer | ||
| + | * Local folder G:\Design\TwinCAT3\tc3Multi_6_24 | ||
| + | * Remote Folder C:\TwinCAT\Stuga\Bnnn\tc3Multi_6_24 | ||
| + | * In remote folder, delete all files and folders except _CompileInfo and _Libraries | ||
| + | * Send new folders (Data Types, Global Variables, POUs) and files below to remote | ||
| + | * Open VS and check if version number correct in Version_Info.txt | ||
| + | * Ensure the correct machine build is un-Remmed</translate> | ||
| + | |Step_Picture_00=Fitting_Zx5_Crank_Upgrade_Annotation_2019-10-16_140117.jpg | ||
| + | |Step_Picture_01=Fitting_Zx5_Crank_Upgrade_Annotation_2019-10-16_140536.jpg | ||
| + | |Step_Picture_02=Fitting_Zx5_Crank_Upgrade_Toggle_Network_1.jpg | ||
| + | |Step_Picture_03=Fitting_Zx5_Crank_Upgrade_Toggle_Network_2.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Map new Links</translate> | |Step_Title=<translate>Map new Links</translate> | ||
| − | |Step_Content=<translate></translate> | + | |Step_Content=<translate><br /> |
| + | {| class="wikitable" | ||
| + | |+ | ||
| + | !Output Ref | ||
| + | !Name | ||
| + | !EtherCAT Slice | ||
| + | !Channel | ||
| + | |- | ||
| + | |273 | ||
| + | |Crank C Fwd | ||
| + | |MC2C | ||
| + | |9 | ||
| + | |- | ||
| + | |275 | ||
| + | |Crank D Fwd | ||
| + | |MC2C | ||
| + | |10 | ||
| + | |- | ||
| + | |274 | ||
| + | |Crank C Rev | ||
| + | |MC2C | ||
| + | |11 | ||
| + | |- | ||
| + | |276 | ||
| + | |Crank D Rev | ||
| + | |MC2C | ||
| + | |12 | ||
| + | |- | ||
| + | |277 | ||
| + | |Crank E Fwd | ||
| + | |MC2E | ||
| + | |10 | ||
| + | |- | ||
| + | |278 | ||
| + | |Crank E Rev | ||
| + | |MC2E | ||
| + | |11 | ||
| + | |}</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Latest Front End software installed</translate> | ||
| + | |Step_Content=<translate>* Backup Old multi folder | ||
| + | * Copy in new winMulti version to c:\multi overwriting what is there</translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
Version du 16 octobre 2019 à 15:15
Fitting the crank upgrade to Z065, Z066, Z067


Difficulté
Difficile
Durée
2 jour(s)
Sommaire
- 1 Introduction
- 2 Étape 1 - Program Eaton Drives before they leave
- 3 Étape 2 - Remove Link arm connecting to rack and pinion
- 4 Étape 3 - Remove pivot shaft and arm
- 5 Étape 4 - Undo clutch and remove Cam
- 6 Étape 5 - Add sprocket to clutch
- 7 Étape 6 - Fix idler plate to upright
- 8 Étape 7 - Fix split sprocket onto drive shaft
- 9 Étape 8 - Drill and pin split sprocket to shaft
- 10 Étape 9 - Add chain minimum length sprocket to sprocket
- 11 Étape 10 - Fit Module C Crank Home sensor plate to Arm 5
- 12 Étape 11 - Fit Module C Crank Out sensor plate to Arm 5
- 13 Étape 12 - Fit Module D Crank Home sensor plate to Arm 5
- 14 Étape 13 - Fit Module D Crank Out sensor plate to Arm 5
- 15 Étape 14 - Fit Module E Crank Out sensor plate to Arm 5
- 16 Étape 15 - Fit Module E Crank Home sensor plate to Arm 5
- 17 Étape 16 - Remove 2 off breaker and contactor Module C
- 18 Étape 17 - Add 2 off single pole breaker Module C
- 19 Étape 18 - Add 2 off Eaton Drive to Module C
- 20 Étape 19 - Add single pole breaker Module E
- 21 Étape 20 - Remove breaker and contactor Module E
- 22 Étape 21 - Add 1 Off Eaton drive to Module E
- 23 Étape 22 - For each Eaton Drive
- 24 Étape 23 - Wire Sensor Cables to EtherCAT boxes
- 25 Étape 24 - Latest Back End Software installed
- 26 Étape 25 - Map new Links
- 27 Étape 26 - Latest Front End software installed
- 28 Étape 27 - Test
- 29 Commentaires
Introduction
This upgrade replaces the crank arm assemblies on Z065, Z066 and Z067 with a direct drive system to improve reliability
Étape 1 - Program Eaton Drives before they leave
Running frequency
Control mode
Accel time
Decel time
Étape 2 - Remove Link arm connecting to rack and pinion
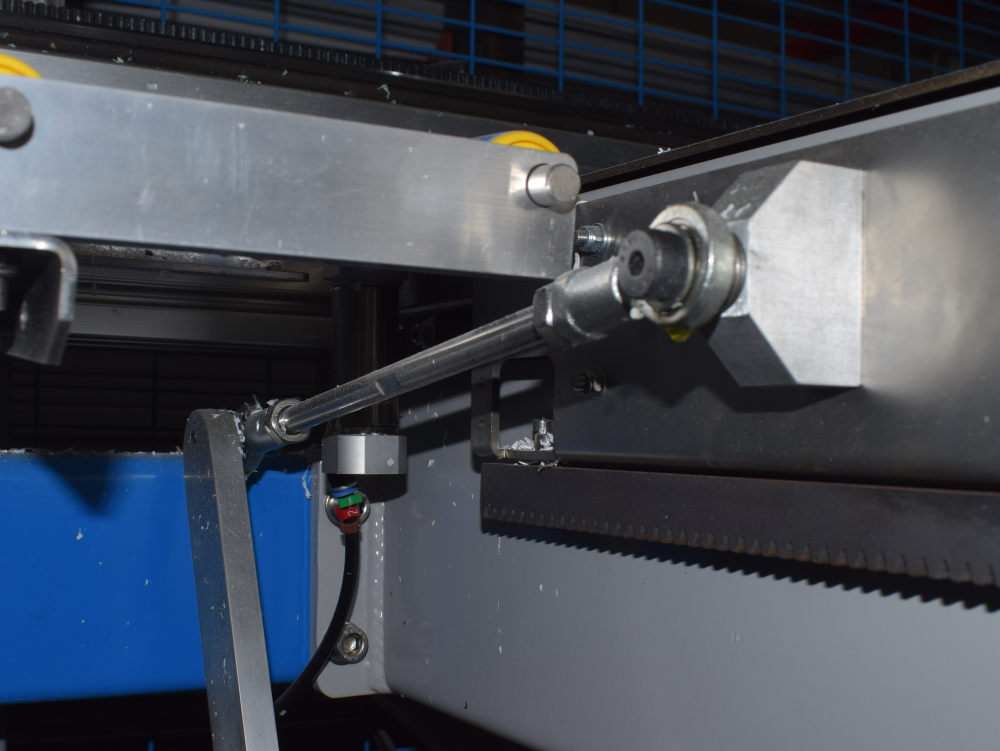
Étape 3 - Remove pivot shaft and arm



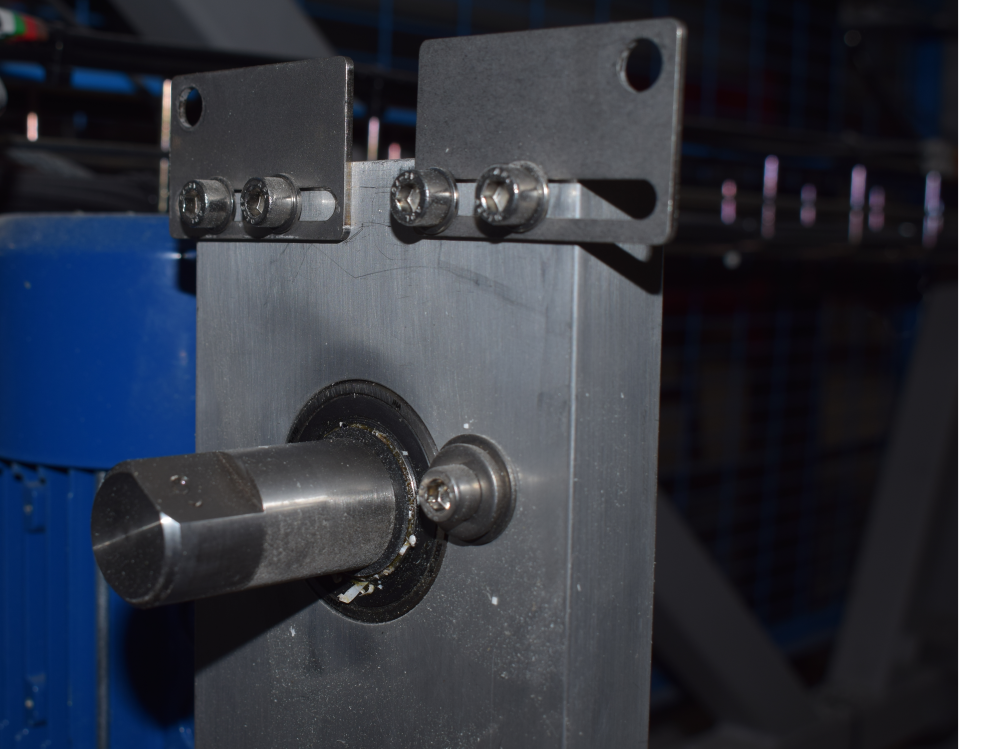
Étape 4 - Undo clutch and remove Cam



Étape 5 - Add sprocket to clutch
B0001166



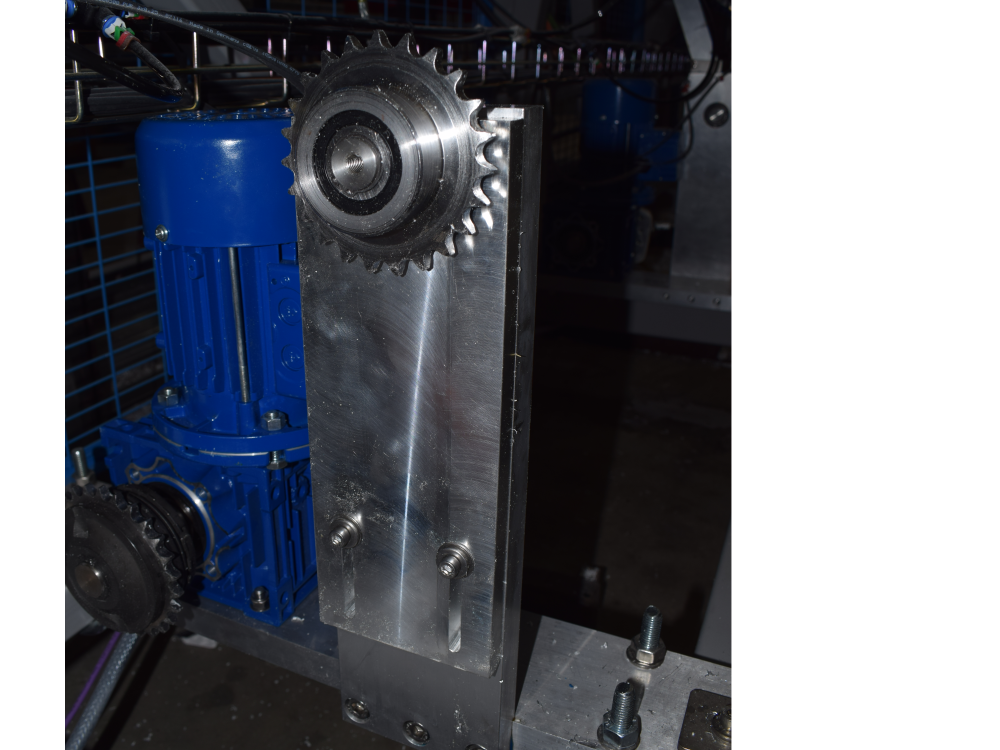
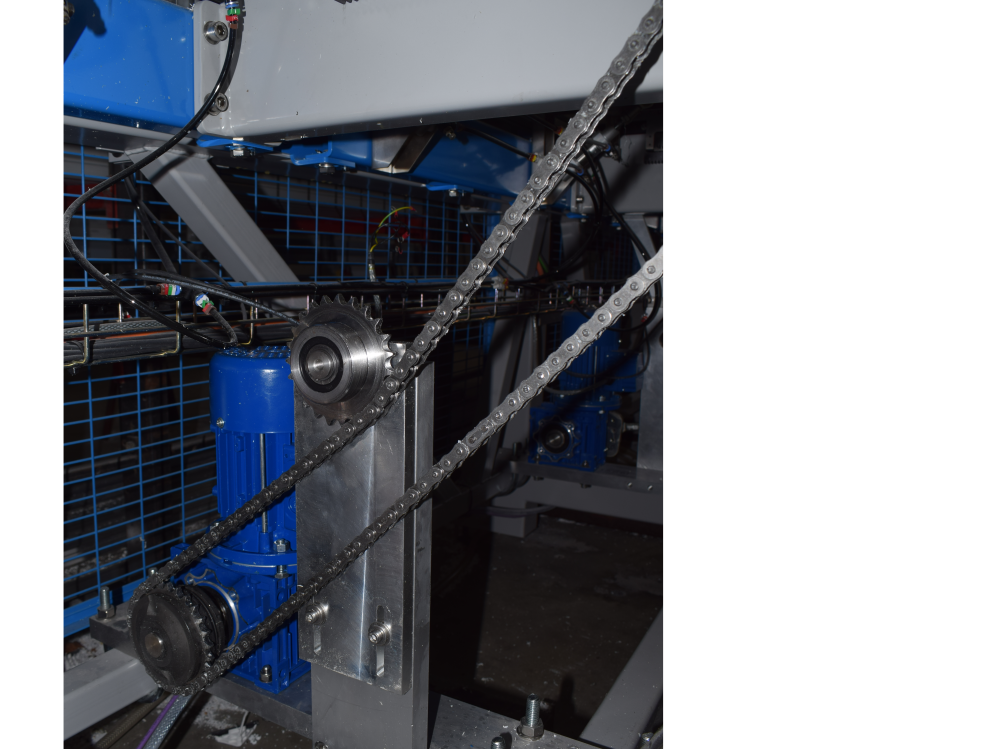
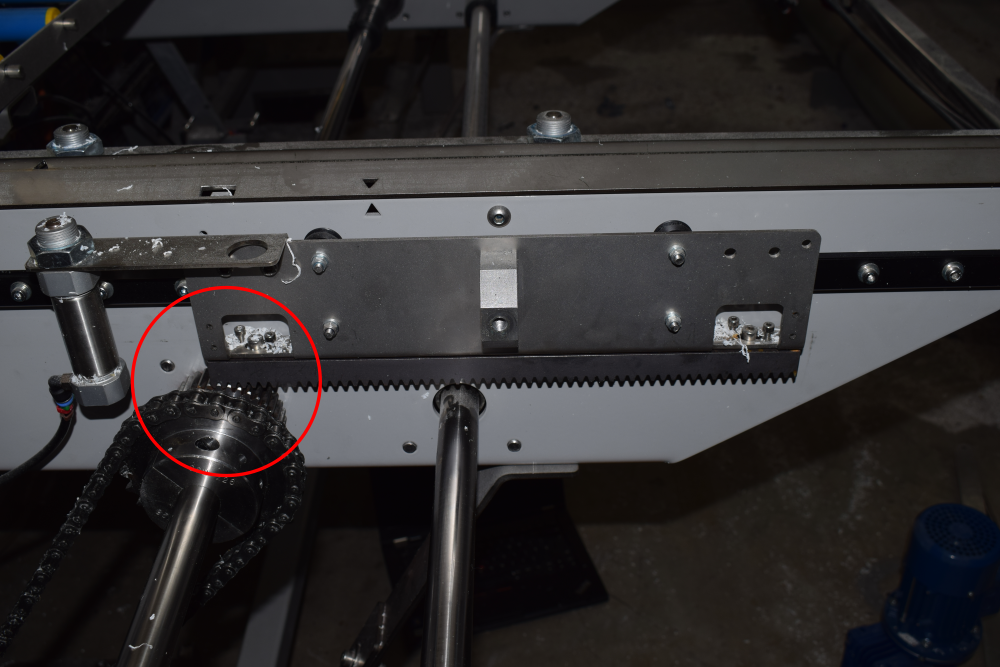
Étape 6 - Fix idler plate to upright

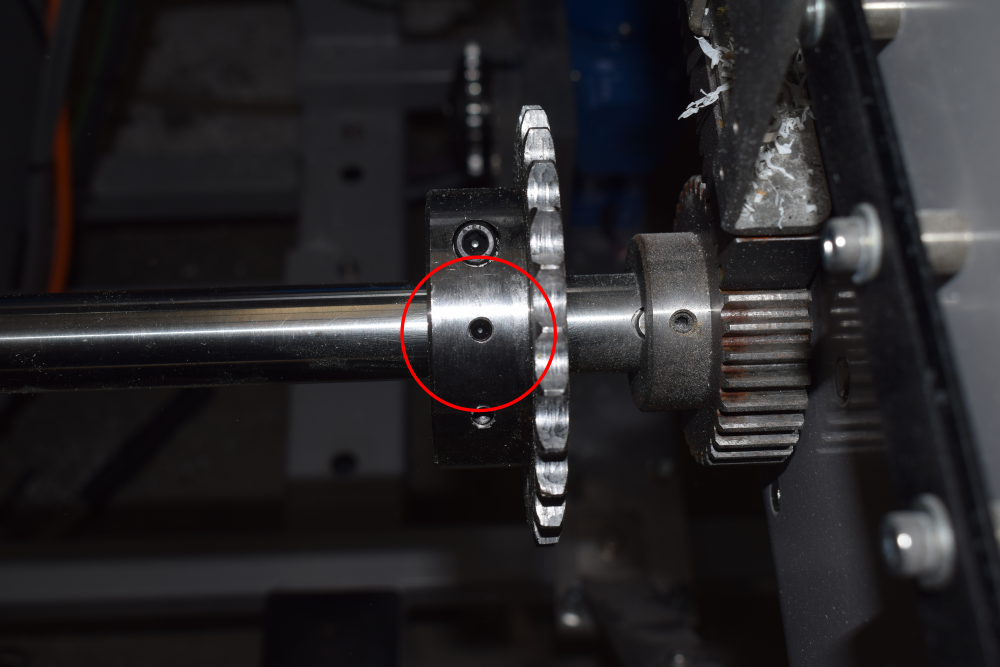
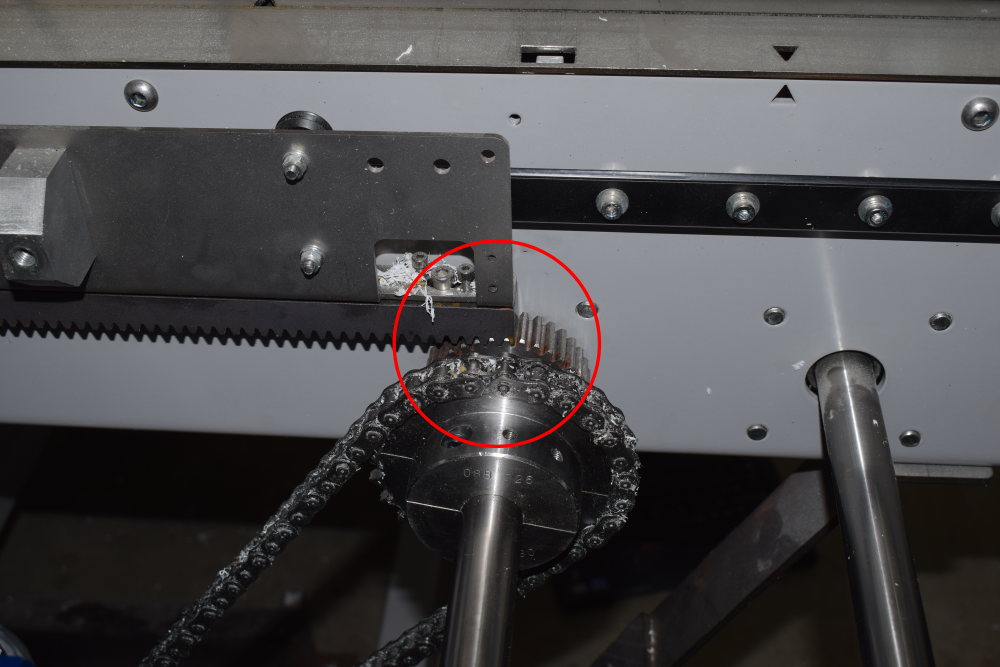
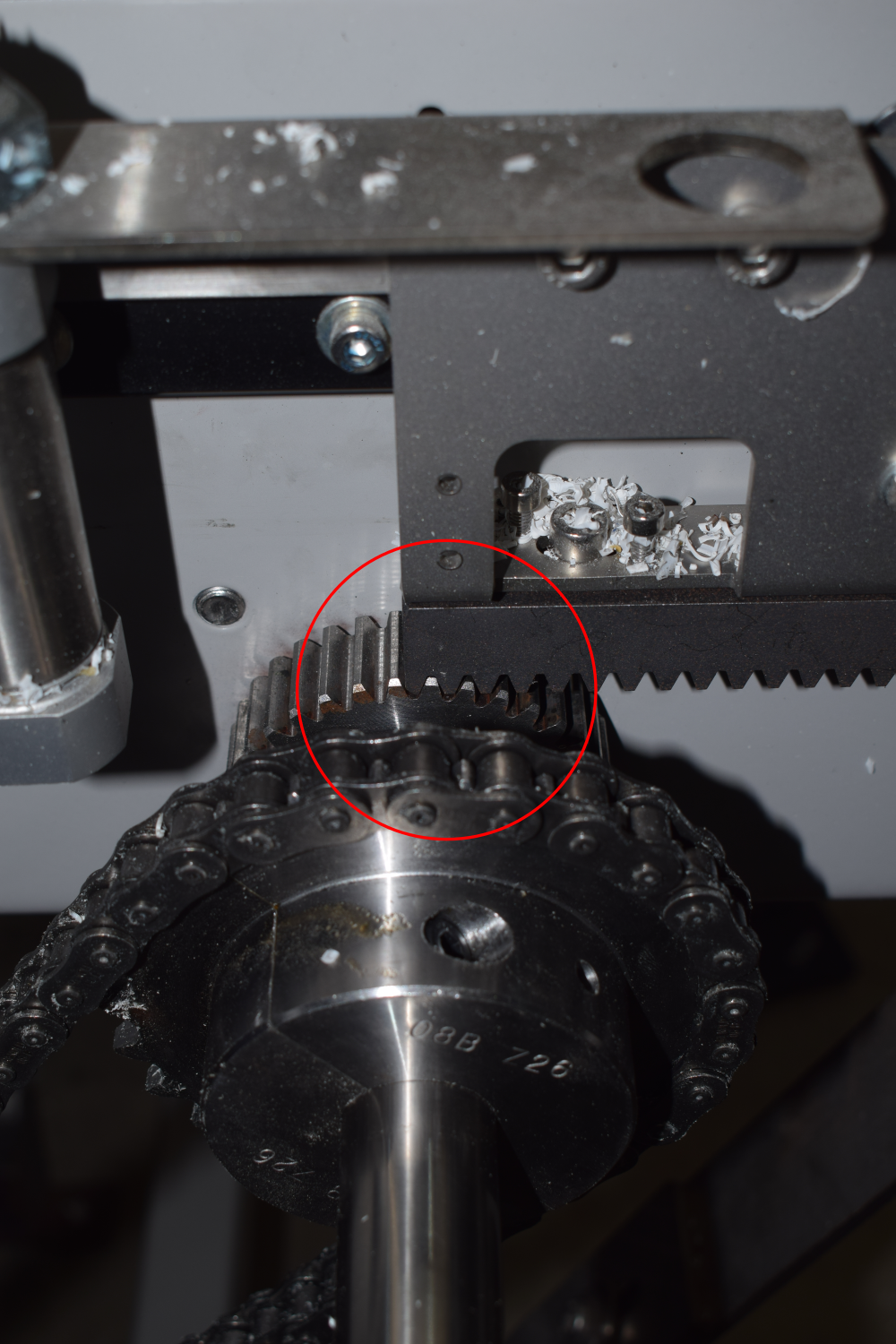
Étape 7 - Fix split sprocket onto drive shaft


Étape 8 - Drill and pin split sprocket to shaft
Étape 9 - Add chain minimum length sprocket to sprocket
Use idler to create tension
Étape 10 - Fit Module C Crank Home sensor plate to Arm 5
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes


Étape 11 - Fit Module C Crank Out sensor plate to Arm 5
This one has an extension that may or not be required. See Module D Crank Out Sensor for more info.
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes

Étape 12 - Fit Module D Crank Home sensor plate to Arm 5
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes

Étape 13 - Fit Module D Crank Out sensor plate to Arm 5
This one has an extension
Sensor cables run to rear Module C cabinet - EtherCAT fieldbus boxes




Étape 14 - Fit Module E Crank Out sensor plate to Arm 5
Sensor cables run to rear Module E cabinet - EtherCAT fieldbus boxes


Étape 15 - Fit Module E Crank Home sensor plate to Arm 5
This one has an extension
Sensor cables run to rear Module E cabinet - EtherCAT fieldbus boxes



Étape 16 - Remove 2 off breaker and contactor Module C


Étape 17 - Add 2 off single pole breaker Module C
Tidy wires away for the spare 2 phases
Étape 18 - Add 2 off Eaton Drive to Module C
May need to move trunking or mount directly to side of enclosure.
Étape 19 - Add single pole breaker Module E
Étape 20 - Remove breaker and contactor Module E
Étape 21 - Add 1 Off Eaton drive to Module E
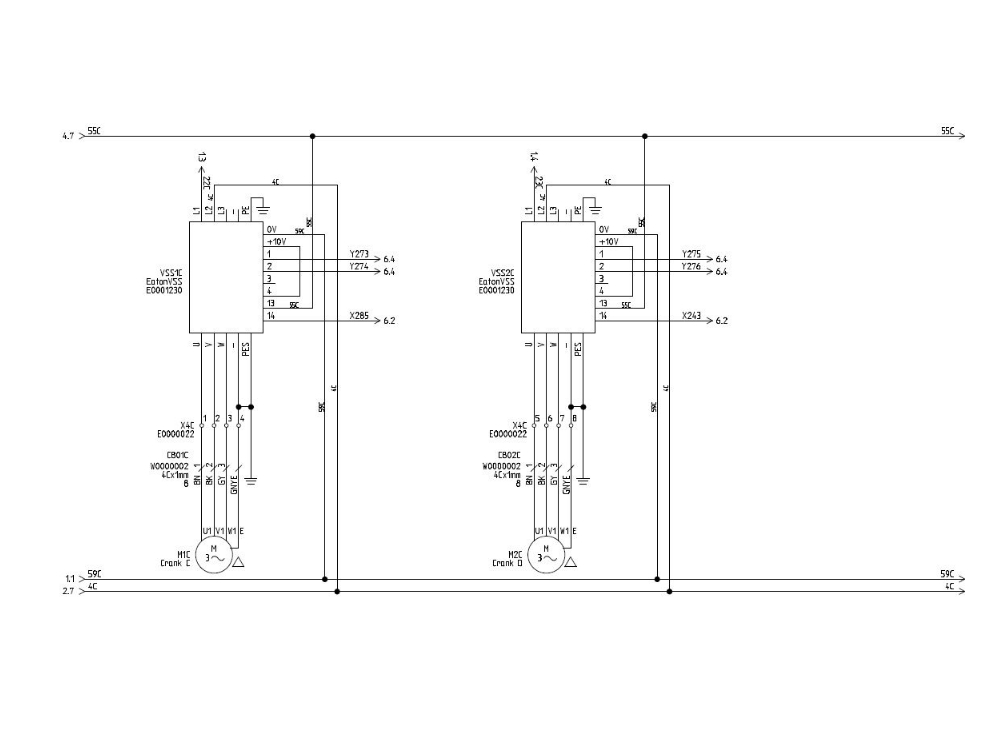
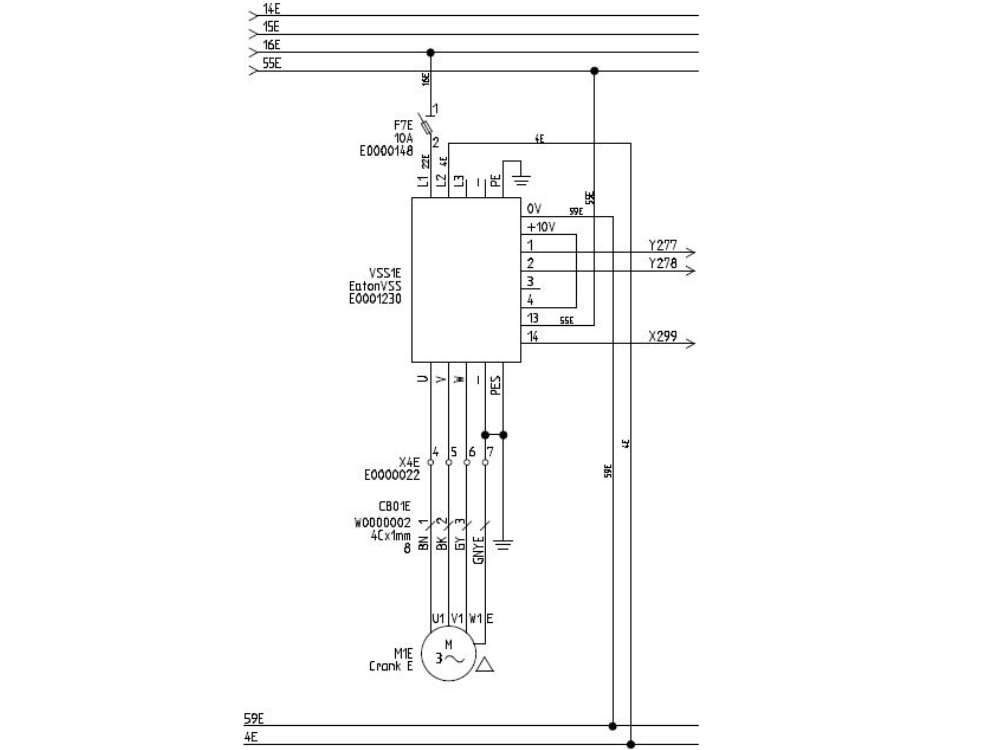
Étape 22 - For each Eaton Drive
- 1 phase
- Neutral
- Earth
- Fwd and Reverse signals
- Wire motor cables directly to bottom of drives
Étape 23 - Wire Sensor Cables to EtherCAT boxes
Module C and D cranks to back of Module C cabinet
Module E crank to back of Module E cabinet


Étape 24 - Latest Back End Software installed
- Open Visual Studio
- Update from Target
- Save Solution as Archive with Bnn.yyyy.mm.dd
- Close VS
- Open File Transfer
- Local folder G:\Design\TwinCAT3\tc3Multi_6_24
- Remote Folder C:\TwinCAT\Stuga\Bnnn\tc3Multi_6_24
- In remote folder, delete all files and folders except _CompileInfo and _Libraries
- Send new folders (Data Types, Global Variables, POUs) and files below to remote
- Open VS and check if version number correct in Version_Info.txt
- Ensure the correct machine build is un-Remmed




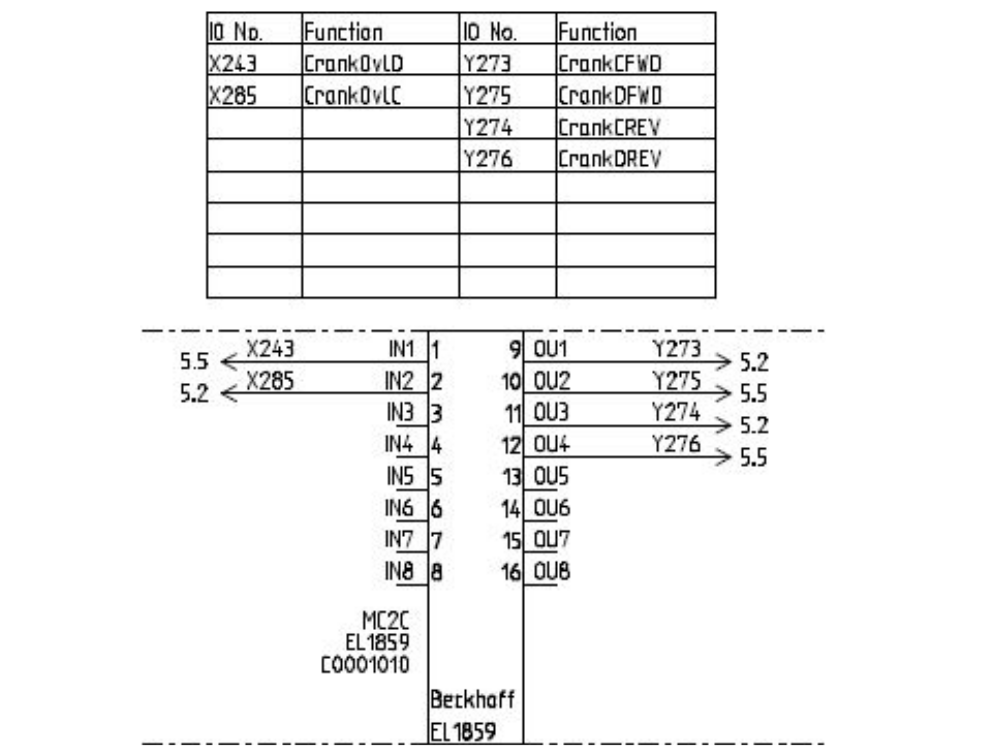
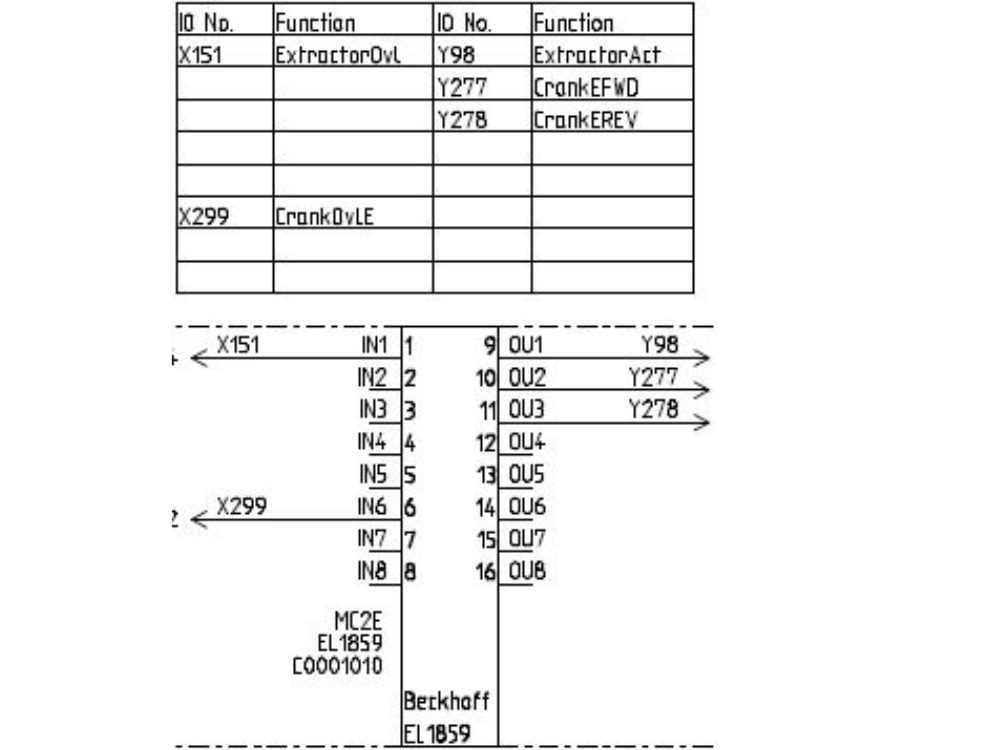
Étape 25 - Map new Links
| Output Ref | Name | EtherCAT Slice | Channel |
|---|---|---|---|
| 273 | Crank C Fwd | MC2C | 9 |
| 275 | Crank D Fwd | MC2C | 10 |
| 274 | Crank C Rev | MC2C | 11 |
| 276 | Crank D Rev | MC2C | 12 |
| 277 | Crank E Fwd | MC2E | 10 |
| 278 | Crank E Rev | MC2E | 11 |
Étape 26 - Latest Front End software installed
- Backup Old multi folder
- Copy in new winMulti version to c:\multi overwriting what is there
Étape 27 - Test
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português