| [version en cours de rédaction] | [version en cours de rédaction] |
(Page créée avec « {{Tuto Details |Description=<translate>For the ZX machines that have a servo motor rather than a piston to rotate the Saw the Torque needs to be reduced significantly</tra... ») |
|||
| (Une révision intermédiaire par le même utilisateur non affichée) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| + | |Main_Picture=SR_Axis_Torque_Adjustment_TorqueCrib.png | ||
| + | |Main_Picture_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":-27,"top":-456,"width":490,"height":862,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.46,"scaleY":1.46,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/d/db/SR_Axis_Torque_Adjustment_TorqueCrib.png","filters":[]}],"height":450,"width":600} | ||
|Description=<translate>For the ZX machines that have a servo motor rather than a piston to rotate the Saw the Torque needs to be reduced significantly</translate> | |Description=<translate>For the ZX machines that have a servo motor rather than a piston to rotate the Saw the Torque needs to be reduced significantly</translate> | ||
|Categories=Maintenance | |Categories=Maintenance | ||
| Ligne 14 : | Ligne 16 : | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Gather Information - Gear Box</translate> | |Step_Title=<translate>Gather Information - Gear Box</translate> | ||
| − | |Step_Content=<translate>Check Axis.mul and look at the line | + | |Step_Content=<translate>Check Axis.mul and look at the line |
SR,7,1,1,'''''291833.500''''',1,200,500,500,125.1,90.0,InF_SRHome,3,20,5,0.0,5.0,10.0,0.000, | SR,7,1,1,'''''291833.500''''',1,200,500,500,125.1,90.0,InF_SRHome,3,20,5,0.0,5.0,10.0,0.000, | ||
| + | |||
Gear ratio | Gear ratio | ||
| Ligne 45 : | Ligne 48 : | ||
|Step_Content=<translate>We are aiming to deliver a torque of no more than 56 Nm | |Step_Content=<translate>We are aiming to deliver a torque of no more than 56 Nm | ||
| − | For 100:1 the motors maximum delivered torque 0.56 Nm | + | For |
| + | |||
| + | 100:1 the motors maximum delivered torque 0.56 Nm | ||
| + | |||
| + | or | ||
| − | + | 50:1 the motors maximum delivered torque 1.12 Nm</translate> | |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Regenerate Projects</translate> | |Step_Title=<translate>Regenerate Projects</translate> | ||
| − | |Step_Content=<translate># Put old projects into a clearly named folder | + | |Step_Content=<translate>#Put old projects into a clearly named folder |
| − | # Create | + | #Create a new empty folder with the name of the machine. |
| − | # Open Project | + | #Open Project "From Target" to the new folder |
| − | # Check the | + | #Check the mappings are present |
| − | # Add a Drive Manager project</translate> | + | #Add a Drive Manager project</translate> |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 63 : | Ligne 70 : | ||
Check the value of P-0-092 this value should be 5.9A (if not seek help) | Check the value of P-0-092 this value should be 5.9A (if not seek help) | ||
| − | Change the value of S-0-0092 to | + | Change the value of S-0-0092 to |
12% for 100:1 | 12% for 100:1 | ||
| Ligne 72 : | Ligne 79 : | ||
| − | If you have an old drive | + | If you have an old drive manager you may have to enter: |
| − | The value may be in .1 scale hence factor | + | The value may be in .1 scale hence factor of 10 and also could be in HEX |
120 or 0C00, | 120 or 0C00, | ||
| Ligne 84 : | Ligne 91 : | ||
|Step_Content=<translate>Check channel B 0x3643:1 s/b 2.95A | |Step_Content=<translate>Check channel B 0x3643:1 s/b 2.95A | ||
| − | Change 0x6872 to | + | Change 0x6872 to |
| + | |||
| + | |||
| + | 24% for 100:1 | ||
| + | |||
| + | or | ||
| + | |||
| + | 48% for 50:1</translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>For Both Drives</translate> | |Step_Title=<translate>For Both Drives</translate> | ||
| − | |Step_Content=<translate># Add to startup | + | |Step_Content=<translate>#Add to startup parameters |
| − | # Download to drive | + | #Download to drive |
| − | # Save project | + | #Save project |
| − | # Activate | + | #Activate |
| − | # Update control | + | #Update control board</translate> |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 101 : | Ligne 115 : | ||
{{Notes}} | {{Notes}} | ||
{{PageLang | {{PageLang | ||
| + | |Language=en | ||
|SourceLanguage=none | |SourceLanguage=none | ||
|IsTranslation=0 | |IsTranslation=0 | ||
| − | |||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
|Complete=Draft | |Complete=Draft | ||
}} | }} | ||
Version actuelle datée du 15 mars 2023 à 22:39
For the ZX machines that have a servo motor rather than a piston to rotate the Saw the Torque needs to be reduced significantly

Difficulté
Moyen
Durée
20 minute(s)
Sommaire
- 1 Étape 1 - Gather Information - Gear Box
- 2 Étape 2 - Gather Information - Drive used
- 3 Étape 3 - Gather Information - Motor Being used
- 4 Étape 4 - Aim
- 5 Étape 5 - Regenerate Projects
- 6 Étape 6 - For a AX5003 Drive
- 7 Étape 7 - For AX8206 Drive
- 8 Étape 8 - For Both Drives
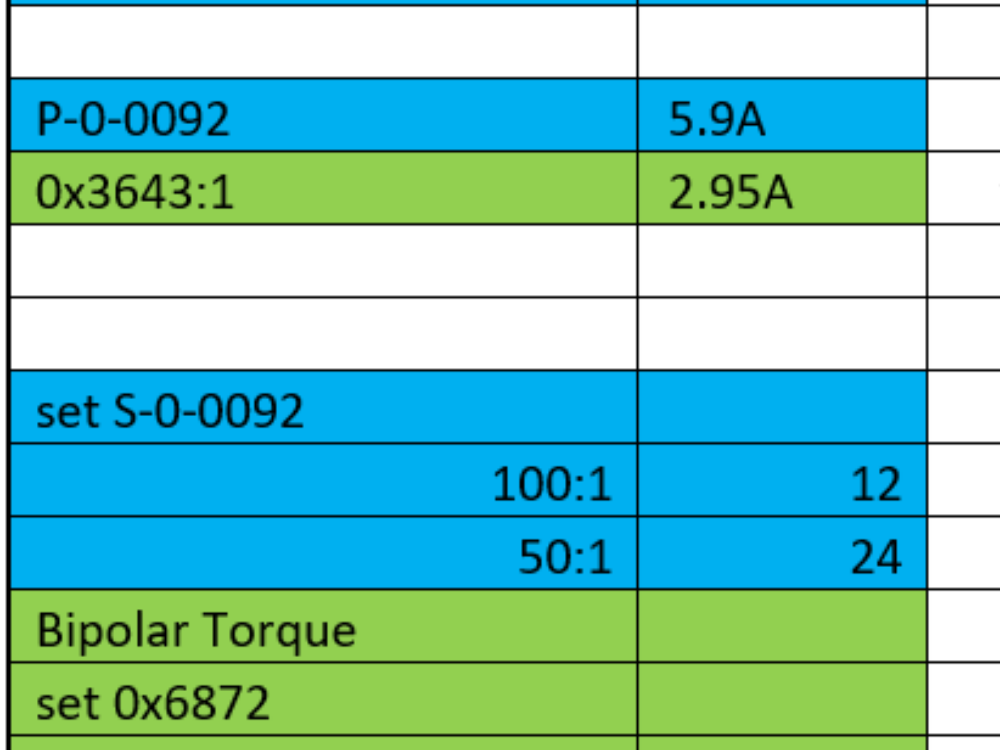
- 9 Étape 9 - Crib Table example
- 10 Commentaires
Étape 1 - Gather Information - Gear Box
Check Axis.mul and look at the line
SR,7,1,1,291833.500,1,200,500,500,125.1,90.0,InF_SRHome,3,20,5,0.0,5.0,10.0,0.000,
Gear ratio
291833.500 100:1
145602.000 50:1
Étape 2 - Gather Information - Drive used
AX8206 Drive
or
AX5003 Drive
Étape 3 - Gather Information - Motor Being used
It should be a AM8032-E
The AM8032-E has torque constant of 0.8 N/A
Étape 4 - Aim
We are aiming to deliver a torque of no more than 56 Nm
For
100:1 the motors maximum delivered torque 0.56 Nm
or
50:1 the motors maximum delivered torque 1.12 Nm
Étape 5 - Regenerate Projects
- Put old projects into a clearly named folder
- Create a new empty folder with the name of the machine.
- Open Project "From Target" to the new folder
- Check the mappings are present
- Add a Drive Manager project
Étape 6 - For a AX5003 Drive
Use drive manager to get to the parameters.
Check the value of P-0-092 this value should be 5.9A (if not seek help)
Change the value of S-0-0092 to
12% for 100:1
or
24% for 50:1
If you have an old drive manager you may have to enter:
The value may be in .1 scale hence factor of 10 and also could be in HEX
120 or 0C00,
240 or F000
Étape 7 - For AX8206 Drive
Check channel B 0x3643:1 s/b 2.95A
Change 0x6872 to
24% for 100:1
or
48% for 50:1
Étape 8 - For Both Drives
- Add to startup parameters
- Download to drive
- Save project
- Activate
- Update control board
Étape 9 - Crib Table example

Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português