| [version en cours de rédaction] | [version en cours de rédaction] |
(Page créée avec « {{Tuto Details |Description=<translate>How to test the function of a Beckhoff axis during commissioning</translate> |Categories=Maintenance |Difficulty=Medium |Duration=2... ») |
|||
| (7 révisions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| + | |Main_Picture=Commissioning_a_Beckhoff_Axis_servo_drives_axxxxx.jpg | ||
| + | |Main_Picture_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":-1,"top":93,"width":570,"height":259,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.06,"scaleY":1.06,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/2/2d/Commissioning_a_Beckhoff_Axis_servo_drives_axxxxx.jpg","filters":[]}],"height":450,"width":600} | ||
|Description=<translate>How to test the function of a Beckhoff axis during commissioning</translate> | |Description=<translate>How to test the function of a Beckhoff axis during commissioning</translate> | ||
|Categories=Maintenance | |Categories=Maintenance | ||
| Ligne 14 : | Ligne 16 : | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Set any stepper motor drives</translate> | |Step_Title=<translate>Set any stepper motor drives</translate> | ||
| − | |Step_Content=<translate>Any stepper drives connected using an EP7041 will need to be set up according to the procedure</translate> | + | |Step_Content=<translate>Any stepper drives connected using an EP7041 will need to be set up according to the [[TB0371 Setup of Beckoff EP7041 Stepper Controller|procedure]].</translate> |
| + | |Step_Picture_00=Commissioning_a_Beckhoff_Axis_stepper_motors.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 52 : | Ligne 55 : | ||
Z axis - positive is up | Z axis - positive is up | ||
| + | |||
| + | V axis - positive is towards rear | ||
R axis - positive is rotation downwards when looking from front of machine | R axis - positive is rotation downwards when looking from front of machine | ||
| Ligne 57 : | Ligne 62 : | ||
SR Axis - positive is always anticlockwise looking from top | SR Axis - positive is always anticlockwise looking from top | ||
| − | SY Axis - positive is | + | SY Axis - positive is towards the front of the saw |
| Ligne 64 : | Ligne 69 : | ||
Direction changed in axes.mul, the parameter after the scaling factor | Direction changed in axes.mul, the parameter after the scaling factor | ||
| − | {{Warning|...Exit winmulti before changing direction in axes.mul. Save | + | {{Warning|...Exit winmulti before changing direction in axes.mul. Save axes.mul then restart WinMulti}}</translate> |
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Check Scaling</translate> | ||
| + | |Step_Content=<translate>There is a possibility that the scaling factor could be different on the machine. this depends on how similar the setup was on the machine that the axes.mul was copied from. | ||
| + | |||
| + | Changes in gearboxes or motors will affect the scaling factor# | ||
| + | |||
| + | |||
| + | Simply mark the axis, move it a known distance and ensure it is correct. | ||
| + | |||
| + | Scaling changed using the formula | ||
| + | |||
| + | |||
| + | [https://stuga.dokit.app/wiki/How_to_Calculate_a_Scaling_Factor new scaling factor = old scaling * distance moved / distance required]</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Ensure the movement is clear</translate> | ||
| + | |Step_Content=<translate>*X and SX - No tools left in track overnight | ||
| + | *Z axis supports removed and air balanced | ||
| + | *V - X axis beam outside the machining centre</translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 73 : | Ligne 98 : | ||
Target positions to stay well within the limitations (you have only guessed the actual position)</translate> | Target positions to stay well within the limitations (you have only guessed the actual position)</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Move all axes in reversing mode</translate> | ||
| + | |Step_Content=<translate>Shakedown to ensure all axes move smoothly at full speed</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Set the drive special parameters</translate> | ||
| + | |Step_Content=<translate>[[Specialised Settings for Beckhoff Drives|https://stuga.dokit.app/wiki/Specialised_Settings_for_Beckhoff_Drives]]</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Test Datum Direction</translate> | ||
| + | |Step_Content=<translate>* By hand, move every axis to roughly the middle of its possible travel or at least off the datum switch. '''This does not apply to the V axis on a ZX5 which works in reverse i.e the axis is 'home' when the switch is not made.''' | ||
| + | * In the drives tab on the service screen in WinMulti press 'Home' on the first axis. Keep a close eye on the direction of travel. If it is travelling away from the datum switch then it is moving in the wrong direction and needs to be stopped quickly. | ||
| + | * Repeat for the rest of the axes in turn. Wait for one axis to finish before starting another one. | ||
| + | * Make a note of which axes are homing in the wrong direction. These will need to be changed in the TwinCAT project.</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Changing the Datum Direction</translate> | ||
| + | |Step_Content=<translate>* Close WinMulti and open the TwinCAT project. | ||
| + | * In the Motion tab in the TwinCAT project navigate to the Axes tab (1). | ||
| + | * Refer to the list you made earlier of the axes that are datuming in the wrong direction. Select the first axis that was wrong and navigate to the 'Enc' tab (2). | ||
| + | * Open the Parameters tab (3) and scroll down to 'Homing' (4) | ||
| + | * There are two parameters in there called 'Invert Direction for Calibration Cam Search' and 'Invert Direction for Sync Inputs Search' | ||
| + | * In order to change the homing direction 'Invert Direction for Calibration Cam Search' needs to be swapped from True to False or from False to True depending on what it is already on. | ||
| + | * In order to change it, use the drop down menu in the 'Offline value' column. When changed, the 'Online value' will change and turn red. Click download to turn it blue again. | ||
| + | * Whatever 'Invert Direction for Calibration Cam Search' is, 'Invert Direction for Sync Inputs Search' needs to be the opposite. Otherwise, the axis will continue to move in the same direction once the switch is made. | ||
| + | {{Info|...More than one parameter cannot be changed at the same time so change one, click 'Dowload' then change another and click 'Dowload' again.}}<br /></translate> | ||
| + | |Step_Picture_00=Commissioning_a_Beckhoff_Axis_Capture.PNG | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":146,"height":327,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":4.11,"scaleY":4.11,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/a/ac/Commissioning_a_Beckhoff_Axis_Capture.PNG","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":373,"top":469,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"1","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":1},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":481,"top":598,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"2","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":2}],"height":1344,"width":600} | ||
| + | |Step_Picture_01=Commissioning_a_Beckhoff_Axis_Capture1.PNG | ||
| + | |Step_Picture_01_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":681,"height":472,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.88,"scaleY":0.88,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/d/db/Commissioning_a_Beckhoff_Axis_Capture1.PNG","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":104,"top":12,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"3","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":3},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":81,"top":304,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"4","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":4},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":295.59,"top":345.83,"width":515.82,"height":34.4,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0}],"height":416,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Changing Reference Mode</translate> | ||
| + | |Step_Content=<translate>*When using a Beckhoff system the GX, Y, Z, SX and SR Axes need to be set to 'Software Sync'. This is a more accurate method of datuming, meaning that the datum will be more consistent as when set to other reference methods, the datum can change by up to 10mm depending on the physical position of the datum switch. | ||
| + | *To change this, stay in the same 'Parameters' tab in the 'Homing' section and follow the same process as above, this time changing the 'Reference mode' (1) to 'Software Sync'. | ||
| + | *Repeat for all the above axes | ||
| + | *Save all' and 'Activate configuration'. | ||
| + | *Reopen WinMulti and test the homing directions again to double check.</translate> | ||
| + | |Step_Picture_00=Commissioning_a_Beckhoff_Axis_Capture1.PNG | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":681,"height":472,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.88,"scaleY":0.88,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/d/db/Commissioning_a_Beckhoff_Axis_Capture1.PNG","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":12,"top":374,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"1","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":1}],"height":416,"width":600} | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
{{PageLang | {{PageLang | ||
| + | |Language=en | ||
|SourceLanguage=none | |SourceLanguage=none | ||
|IsTranslation=0 | |IsTranslation=0 | ||
| − | |||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
|Complete=Draft | |Complete=Draft | ||
}} | }} | ||
Version actuelle datée du 6 octobre 2020 à 10:14
How to test the function of a Beckhoff axis during commissioning


Difficulté
Moyen
Durée
2 heure(s)
Sommaire
[masquer]- 1 Introduction
- 2 Étape 1 - Set any stepper motor drives
- 3 Étape 2 - Check Axis IDs
- 4 Étape 3 - Software
- 5 Étape 4 - Ensure axis is enabled
- 6 Étape 5 - Set Rough Absolute position
- 7 Étape 6 - Check Axis Direction - move slowly and short distance
- 8 Étape 7 - Check Scaling
- 9 Étape 8 - Ensure the movement is clear
- 10 Étape 9 - Reversing move - High Speed
- 11 Étape 10 - Move all axes in reversing mode
- 12 Étape 11 - Set the drive special parameters
- 13 Étape 12 - Test Datum Direction
- 14 Étape 13 - Changing the Datum Direction
- 15 Étape 14 - Changing Reference Mode
- 16 Commentaires
Introduction
Étape 1 - Set any stepper motor drives
Any stepper drives connected using an EP7041 will need to be set up according to the procedure.

Étape 2 - Check Axis IDs
Ensure the axis.mul file is set up with the same axis Ids as the TwinCAT project
Second number in axes.mul file
Étape 3 - Software
The following software setup needs to be done
- TwinCAT project setup with all io and axes linked
- Estop system reset
- Air on
- winMulti running in setup mode
Étape 4 - Ensure axis is enabled
- All 3 Enable signals
- 100% Override
- Axis Ready
Étape 5 - Set Rough Absolute position
On the functions tab, set the absolute position by eye.
This ensures the axis is in the correct place for test positioning
** Diagram for axis directions and distances **
Étape 6 - Check Axis Direction - move slowly and short distance
X and SX axis - positive is out of machine towards outfeed
Y axis - positive towards rear
Z axis - positive is up
V axis - positive is towards rear
R axis - positive is rotation downwards when looking from front of machine
SR Axis - positive is always anticlockwise looking from top
SY Axis - positive is towards the front of the saw
Relative move on axis slowly plus and minus to test direction
Direction changed in axes.mul, the parameter after the scaling factor
Étape 7 - Check Scaling
There is a possibility that the scaling factor could be different on the machine. this depends on how similar the setup was on the machine that the axes.mul was copied from.
Changes in gearboxes or motors will affect the scaling factor#
Simply mark the axis, move it a known distance and ensure it is correct.
Scaling changed using the formula
new scaling factor = old scaling * distance moved / distance required
Étape 8 - Ensure the movement is clear
- X and SX - No tools left in track overnight
- Z axis supports removed and air balanced
- V - X axis beam outside the machining centre
Étape 9 - Reversing move - High Speed
Reversing move on axis.
Set speed to the maximum for each axis
Target positions to stay well within the limitations (you have only guessed the actual position)
Étape 10 - Move all axes in reversing mode
Shakedown to ensure all axes move smoothly at full speed
Étape 11 - Set the drive special parameters
https://stuga.dokit.app/wiki/Specialised_Settings_for_Beckhoff_Drives
Étape 12 - Test Datum Direction
- By hand, move every axis to roughly the middle of its possible travel or at least off the datum switch. This does not apply to the V axis on a ZX5 which works in reverse i.e the axis is 'home' when the switch is not made.
- In the drives tab on the service screen in WinMulti press 'Home' on the first axis. Keep a close eye on the direction of travel. If it is travelling away from the datum switch then it is moving in the wrong direction and needs to be stopped quickly.
- Repeat for the rest of the axes in turn. Wait for one axis to finish before starting another one.
- Make a note of which axes are homing in the wrong direction. These will need to be changed in the TwinCAT project.
Étape 13 - Changing the Datum Direction
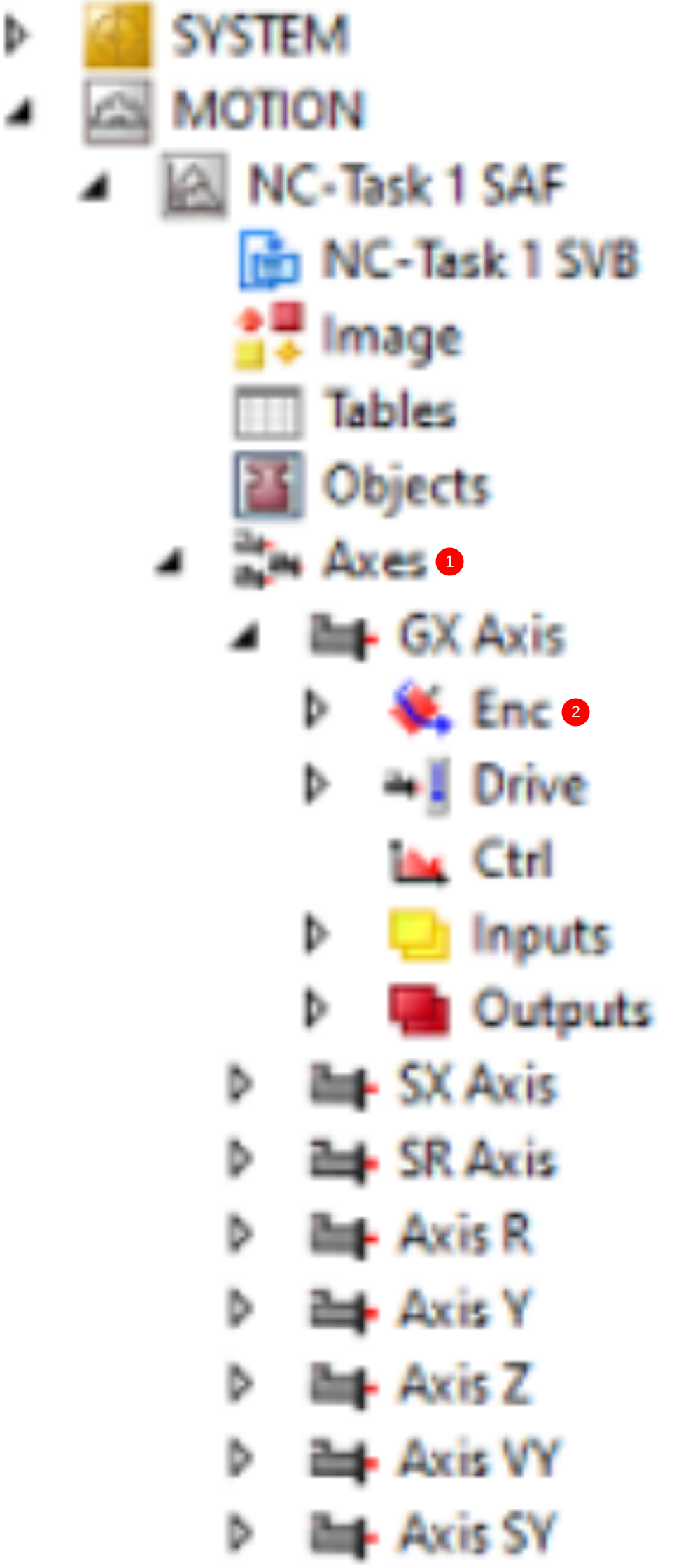
- Close WinMulti and open the TwinCAT project.
- In the Motion tab in the TwinCAT project navigate to the Axes tab (1).
- Refer to the list you made earlier of the axes that are datuming in the wrong direction. Select the first axis that was wrong and navigate to the 'Enc' tab (2).
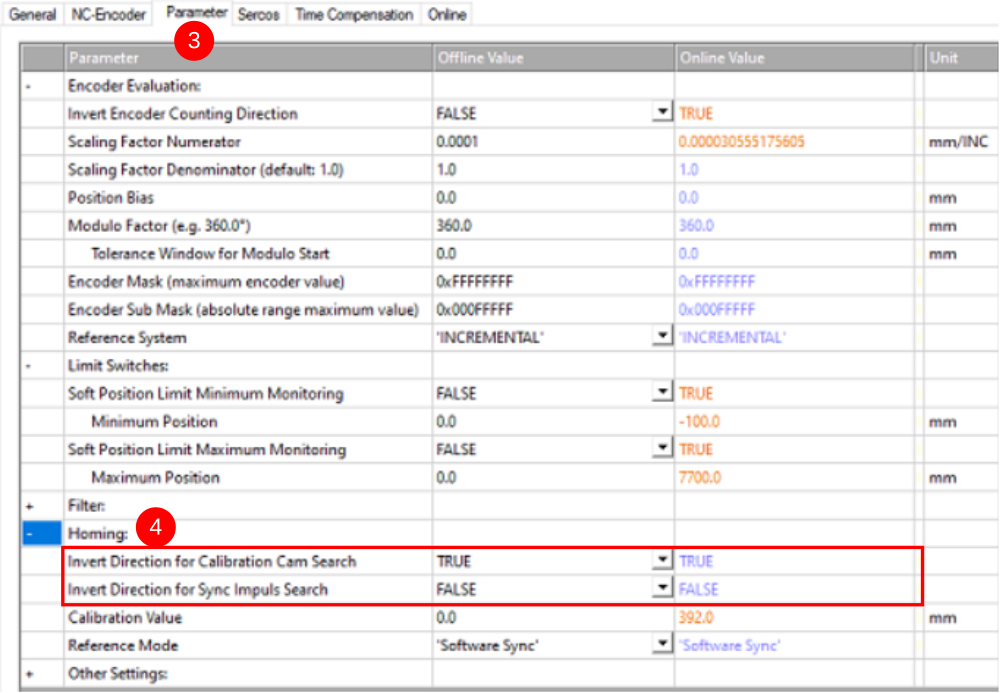
- Open the Parameters tab (3) and scroll down to 'Homing' (4)
- There are two parameters in there called 'Invert Direction for Calibration Cam Search' and 'Invert Direction for Sync Inputs Search'
- In order to change the homing direction 'Invert Direction for Calibration Cam Search' needs to be swapped from True to False or from False to True depending on what it is already on.
- In order to change it, use the drop down menu in the 'Offline value' column. When changed, the 'Online value' will change and turn red. Click download to turn it blue again.
- Whatever 'Invert Direction for Calibration Cam Search' is, 'Invert Direction for Sync Inputs Search' needs to be the opposite. Otherwise, the axis will continue to move in the same direction once the switch is made.
Étape 14 - Changing Reference Mode
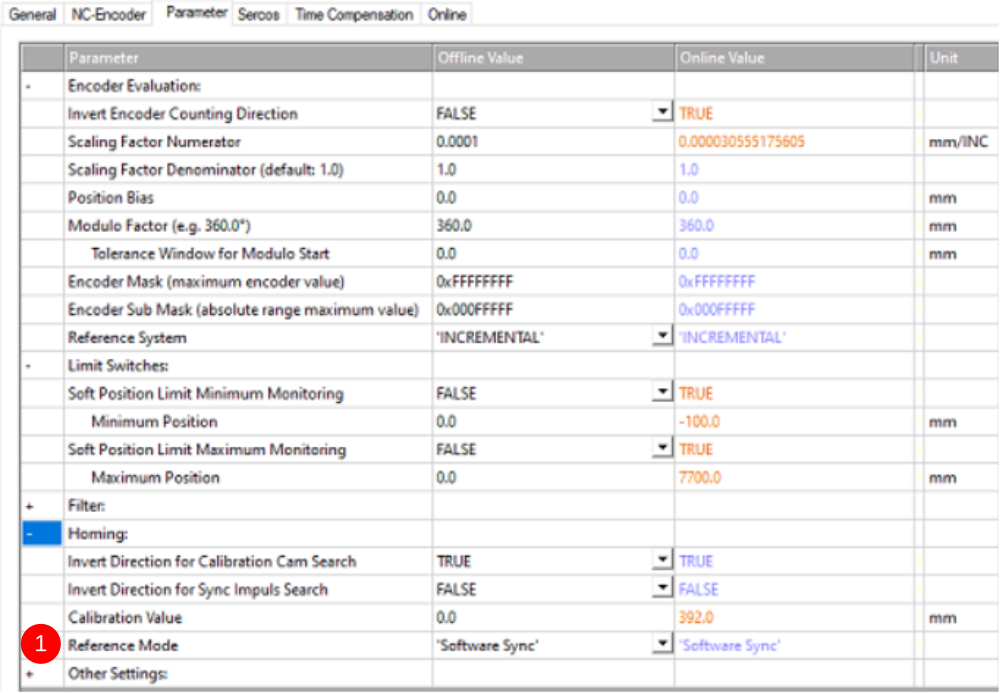
- When using a Beckhoff system the GX, Y, Z, SX and SR Axes need to be set to 'Software Sync'. This is a more accurate method of datuming, meaning that the datum will be more consistent as when set to other reference methods, the datum can change by up to 10mm depending on the physical position of the datum switch.
- To change this, stay in the same 'Parameters' tab in the 'Homing' section and follow the same process as above, this time changing the 'Reference mode' (1) to 'Software Sync'.
- Repeat for all the above axes
- Save all' and 'Activate configuration'.
- Reopen WinMulti and test the homing directions again to double check.
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português