| [version en cours de rédaction] | [version en cours de rédaction] |
| (8 révisions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| − | |Description=<translate>How to set ultrasonic sensor | + | |Main_Picture=Setting_Ultrasonic_Sensor_on_infeed_Table_E0001120.JPG |
| + | |Main_Picture_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":86,"top":18,"width":320,"height":320,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.41,"scaleY":1.41,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/0/08/Setting_Ultrasonic_Sensor_on_infeed_Table_E0001120.JPG","filters":[]}],"height":450.197628458498,"width":600} | ||
| + | |Description=<translate>How to set ultrasonic sensor to detect profile</translate> | ||
| + | |Categories=Maintenance | ||
|Difficulty=Easy | |Difficulty=Easy | ||
|Duration=2 | |Duration=2 | ||
| Ligne 7 : | Ligne 10 : | ||
}} | }} | ||
{{Introduction | {{Introduction | ||
| − | |Introduction=<translate></translate> | + | |Introduction=<translate>How to set up an ultrasonic sensor when it is mounted vertically. This is normally the case on ZX5 machines on the "Mod_Clear" functions near the rollers. |
| + | |||
| + | <br /></translate> | ||
}} | }} | ||
{{TutoVideo | {{TutoVideo | ||
| Ligne 14 : | Ligne 19 : | ||
}} | }} | ||
{{Materials}} | {{Materials}} | ||
| + | {{EPI}} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Ensure there is 30mm clearance from sensor to profile</translate> | |Step_Title=<translate>Ensure there is 30mm clearance from sensor to profile</translate> | ||
| − | |Step_Content=<translate>If the sensor is closer, it will not work</translate> | + | |Step_Content=<translate>If the sensor is closer than 30mm, it will not work</translate> |
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_0.JPG | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Press button with profile in place</translate> | |Step_Title=<translate>Press button with profile in place</translate> | ||
| − | |Step_Content=<translate>Hold button in until yellow | + | |Step_Content=<translate>Hold button in until yellow and green lights flash, let go</translate> |
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_1.JPG | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":1525,"height":1273,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.39,"scaleY":0.39,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/8/8f/Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_1.JPG","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":292.14,"top":217.14,"width":56.1,"height":56.1,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":28.04904306393432,"ry":28.04904306393432}],"height":501,"width":600} | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 27 : | Ligne 36 : | ||
Hold until flashing stops</translate> | Hold until flashing stops</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_2.JPG | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":683,"height":464,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.88,"scaleY":0.88,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/9/9f/Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_2.JPG","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":241.97,"top":119.97,"width":68.12,"height":68.12,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":34.05782968040668,"ry":34.05782968040668}],"height":408,"width":600} | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Check that it works</translate> | |Step_Title=<translate>Check that it works</translate> | ||
| − | |Step_Content=<translate></translate> | + | |Step_Content=<translate>Light will come on when object is detected</translate> |
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_3.JPG | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":760,"height":507,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.79,"scaleY":0.79,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/c/ce/Setting_Ultrasonic_Sensor_on_infeed_Table_Ultra_3.JPG","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":226,"top":125,"width":0,"height":102,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":0,"x2":0,"y1":-51,"y2":51,"x2a":8,"y2a":31,"x2b":-8,"y2b":31},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":226,"top":74,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":226,"top":176,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":267.5,"top":123,"width":1,"height":100,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-0.5,"x2":0.5,"y1":50,"y2":-50,"x2a":8.299610029247564,"y2a":-29.921003924706273,"x2b":-7.699590030747438,"y2b":-30.080995925306222},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":267,"top":173,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":268,"top":73,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":400,"width":600} | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
Version actuelle datée du 31 mars 2020 à 14:42
How to set ultrasonic sensor to detect profile


Difficulté
Facile
Durée
2 minute(s)
Introduction
How to set up an ultrasonic sensor when it is mounted vertically. This is normally the case on ZX5 machines on the "Mod_Clear" functions near the rollers.
Vimeo
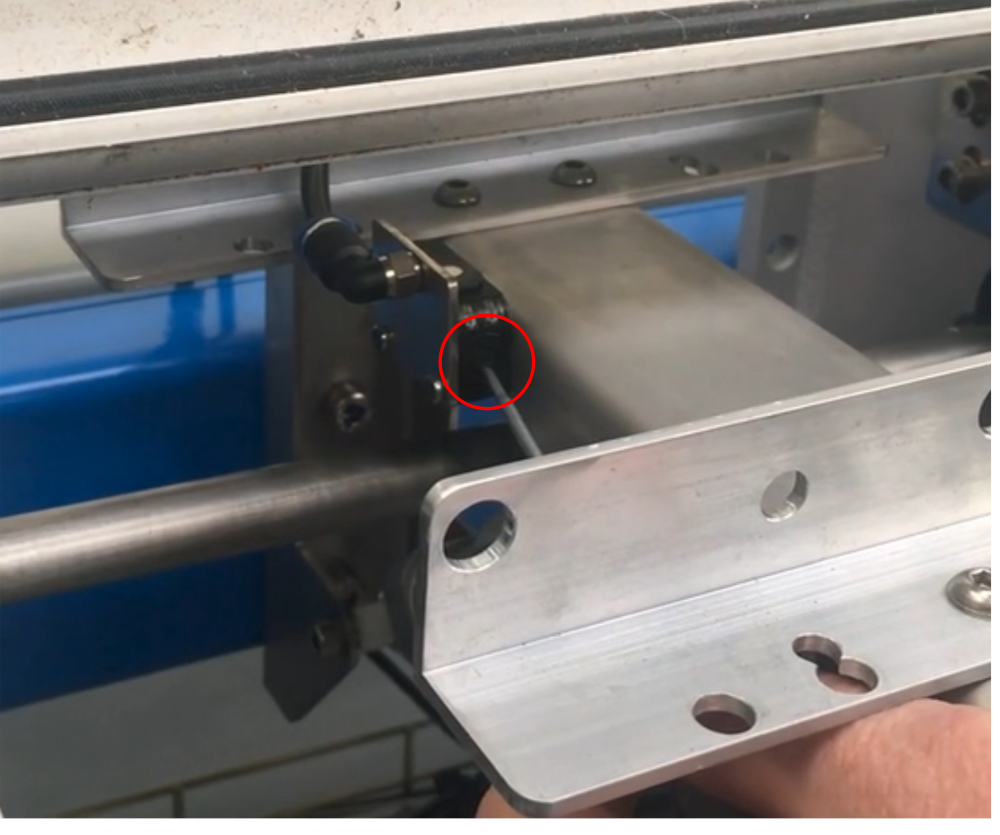
Étape 1 - Ensure there is 30mm clearance from sensor to profile
If the sensor is closer than 30mm, it will not work

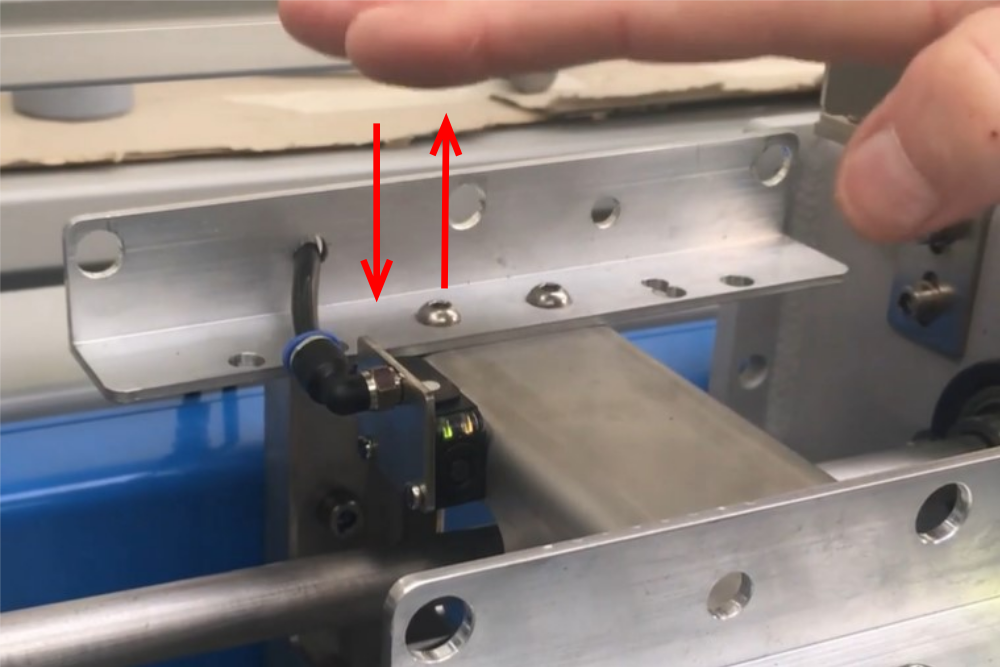
Étape 2 - Press button with profile in place
Hold button in until yellow and green lights flash, let go
Étape 3 - Press Button with profile removed
This sets the longest range of the sensor.
Hold until flashing stops

Étape 4 - Check that it works
Light will come on when object is detected
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português