| [version en cours de rédaction] | [version en cours de rédaction] |
(Page créée avec « {{Tuto Details |Description=<translate>Tuning of EP7041 box is tricky, but following a step through telephone call with Etienne at Beckhoff, it was successful with the fol... ») |
|||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
|Description=<translate>Tuning of EP7041 box is tricky, but following a step through telephone call with Etienne at Beckhoff, it was successful with the following steps</translate> | |Description=<translate>Tuning of EP7041 box is tricky, but following a step through telephone call with Etienne at Beckhoff, it was successful with the following steps</translate> | ||
| − | |Categories=Software | + | |Categories=Maintenance, Software |
| − | |Tags=TB0371, | + | |Tags=TB0371, EP7041, Stepper, Beckhoff |
}} | }} | ||
| − | <translate>= | + | <translate>= EP7041 Setup = |
| − | + | ==Set up Remote Box CoE Online Tab== | |
{{#annotatedImageLight:Fichier:TB0371 Setup of Beckoff Image.png|0=1016px|hash=|jsondata=|mediaClass=Image|type=frameless|align=center|src=https://stuga.dokit.app/images/0/08/TB0371_Setup_of_Beckoff_Image.png|href=./Fichier:TB0371 Setup of Beckoff Image.png|resource=./Fichier:TB0371 Setup of Beckoff Image.png|caption=|size=1016px}} | {{#annotatedImageLight:Fichier:TB0371 Setup of Beckoff Image.png|0=1016px|hash=|jsondata=|mediaClass=Image|type=frameless|align=center|src=https://stuga.dokit.app/images/0/08/TB0371_Setup_of_Beckoff_Image.png|href=./Fichier:TB0371 Setup of Beckoff Image.png|resource=./Fichier:TB0371 Setup of Beckoff Image.png|caption=|size=1016px}} | ||
| − | {| class="wikitable" width="748" border="1 | + | {| class="wikitable" width="748" border="1" cellpadding="8" cellspacing="0" bordercolor="#4f81bd" |
| width="68" bgcolor="#4f81bd" |'''Parameter''' | | width="68" bgcolor="#4f81bd" |'''Parameter''' | ||
| width="169" bgcolor="#4f81bd" |'''Notes''' | | width="169" bgcolor="#4f81bd" |'''Notes''' | ||
| Ligne 57 : | Ligne 57 : | ||
| width="103" bgcolor="#dbe5f1" |Encoder | | width="103" bgcolor="#dbe5f1" |Encoder | ||
|} | |} | ||
| − | + | {{Warning|...Following Any CoE change you need to do Online reset for EtherCAT master [Right click on Devicenn] NCAxis setup}} | |
| + | |||
| + | |||
| + | == Axis Parameters (Under NC Task) == | ||
| + | {{#annotatedImageLight:Fichier:TB0371 Setup of Beckoff 2.png|0=800px|hash=3f2a5e9cdc7572849699a34888c4cfab|jsondata={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":564,"height":380,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.42,"scaleY":1.42,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/7/71/TB0371_Setup_of_Beckoff_2.png","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":58,"top":431.5,"width":56,"height":21,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-28,"x2":28,"y1":-10.5,"y2":10.5,"x2a":12.082403981326243,"y2a":-4.0131022523201905,"x2b":6.464428915911975,"y2b":10.968164588784521},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":30,"top":421,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":86,"top":442,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":324,"top":66.5,"width":74,"height":65,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-37,"x2":37,"y1":32.5,"y2":-32.5,"x2a":27.253179215211638,"y2a":-13.290640703312942,"x2b":16.694123365024247,"y2b":-25.311719671218587},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":287,"top":99,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":361,"top":34,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":539,"width":800}|mediaClass=Image|type=frameless|align=center|src=/images/thumb/7/71/TB0371_Setup_of_Beckoff_2.png/ia-3f2a5e9cdc7572849699a34888c4cfab-px-TB0371_Setup_of_Beckoff_2.png.png|href=./Fichier:TB0371 Setup of Beckoff 2.png|resource=./Fichier:TB0371 Setup of Beckoff 2.png|caption=|size=800px}} | ||
| + | |||
| + | |||
| + | {| class="wikitable" border="1" cellspacing="0" cellpadding="0" | ||
| + | | width="75" valign="top" |'''Parameter''' | ||
| + | | width="208" valign="top" |'''Notes''' | ||
| + | | width="58" valign="top" |'''ZX5 SY''' | ||
| + | | width="106" valign="top" |'''AF2 SY''' | ||
| + | | width="106" valign="top" |'''AF2 GY''' | ||
| + | | width="106" valign="top" |'''AF2 GZ''' | ||
| + | |- | ||
| + | | width="75" valign="top" |'''Ref velocity''' | ||
| + | | width="208" valign="top" |in user units – has to match speed range 8012:05. | ||
| + | |||
| + | 2000 Steps/sec =50mm per sec | ||
| + | |||
| + | on 10mm pitch, doubled for Centraliser with 200 steps/rev | ||
| + | |||
| + | 2000/200 | ||
| + | | width="58" valign="top" |50 | ||
| + | | width="106" valign="top" |50 | ||
| + | | width="106" valign="top" |500 | ||
| + | | width="106" valign="top" |500 | ||
| + | |- | ||
| + | | width="75" valign="top" |'''Max Velocity''' | ||
| + | | width="208" valign="top" |Stuga Limit (less than Ref velocity) | ||
| + | | width="58" valign="top" |15 | ||
| + | | width="106" valign="top" |25 | ||
| + | | width="106" valign="top" |100 | ||
| + | | width="106" valign="top" |100 | ||
| + | |} | ||
| + | |||
| + | == Encoder Setup – Enc == | ||
| + | {{#annotatedImageLight:Fichier:TB0371 Setup of Beckoff 3.png|0=659px|hash=e108e9a60c45ac01280fa174a29ccc32|jsondata={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":659,"height":380,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/1/14/TB0371_Setup_of_Beckoff_3.png","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":42,"top":301,"width":50,"height":32,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-25,"x2":25,"y1":-16,"y2":16,"x2a":12.46700155815671,"y2a":-1.5192451337594362,"x2b":3.842142415382832,"y2b":11.957097276824747},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":17,"top":285,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":67,"top":317,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":380,"width":659}|mediaClass=Image|type=frameless|align=center|src=/images/thumb/1/14/TB0371_Setup_of_Beckoff_3.png/ia-e108e9a60c45ac01280fa174a29ccc32-px-TB0371_Setup_of_Beckoff_3.png.png|href=./Fichier:TB0371 Setup of Beckoff 3.png|resource=./Fichier:TB0371 Setup of Beckoff 3.png|caption=|size=659px}}<br /> | ||
| + | {| class="wikitable" border="1" cellspacing="0" cellpadding="0" | ||
| + | | width="92" valign="top" |'''Parameter''' | ||
| + | | width="145" valign="top" |'''Notes''' | ||
| + | | width="115" valign="top" |'''ZX5 SY''' | ||
| + | | width="102" valign="top" |'''AF2 SY''' | ||
| + | | width="102" valign="top" |'''AF2 GY''' | ||
| + | | width="102" valign="top" |'''AF2 GZ''' | ||
| + | |- | ||
| + | | width="92" valign="top" |'''Numerator''' | ||
| + | | width="145" valign="top" |Pitch of leadscrew | ||
| + | | width="115" valign="top" |10 | ||
| + | | width="102" valign="top" |10 | ||
| + | | width="102" valign="top" |100 | ||
| + | | width="102" valign="top" |100 | ||
| + | |- | ||
| + | | width="92" valign="top" |'''Denominator''' | ||
| + | | width="145" valign="top" |Encoder counts per rev (if feedback is Encoder) | ||
| + | | width="115" valign="top" |4096 | ||
| + | | width="102" valign="top" |4096 | ||
| + | | width="102" valign="top" |4096 | ||
| + | | width="102" valign="top" |4096 | ||
| + | |- | ||
| + | | width="92" valign="top" |'''Scale''' | ||
| + | | width="145" valign="top" | | ||
| + | | width="115" valign="top" | | ||
| + | | width="102" valign="top" |409.6 | ||
| + | | width="102" valign="top" |45.86 | ||
| + | | width="102" valign="top" |45.86 | ||
| + | |- | ||
| + | | colspan="6" width="659" valign="top" |'''Note – the above two parameters will be overwritten by the Scale factor from the front end each time the front end is reset''' | ||
| + | |} | ||
| + | {{Warning|...Activate the configuration at the end}}<br /></translate> | ||
{{PageLang | {{PageLang | ||
| + | |Language=en | ||
|SourceLanguage=none | |SourceLanguage=none | ||
|IsTranslation=0 | |IsTranslation=0 | ||
| − | |||
}} | }} | ||
{{AddComments}} | {{AddComments}} | ||
Version du 12 février 2020 à 20:59
Tuning of EP7041 box is tricky, but following a step through telephone call with Etienne at Beckhoff, it was successful with the following steps

EP7041 Setup
Set up Remote Box CoE Online Tab

| Parameter | Notes | ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| 8010 – 04 | Motor Coil Resistance (Small Motor 28 [0.28Ohm]) | 28 | 36 | 36 | 36 |
| 8010 – 06 | Motor FullSteps – always 200 for Beckhoff Steppers | 200 | 200 | 200 | 200 |
| 8010 – 07 | Encoder Increments – always 4096 for Beckhoff Steppers | 4096 | 4096 | 4096 | 4096 |
| 8012 - 05 | Speed range is max speed in motor steps, calculated from pitch, max speed etc.
Needs to tie up with Ref velocity in NC Parameters – see below |
2000 | 1000 | 1000 | 1000 |
| 8012 - 08 | Feedback type
Encoder feedback is best as it closes the loop. For open loop, use Internal, but this can loose steps / position |
Encoder | Encoder | Encoder | Encoder |
Axis Parameters (Under NC Task)
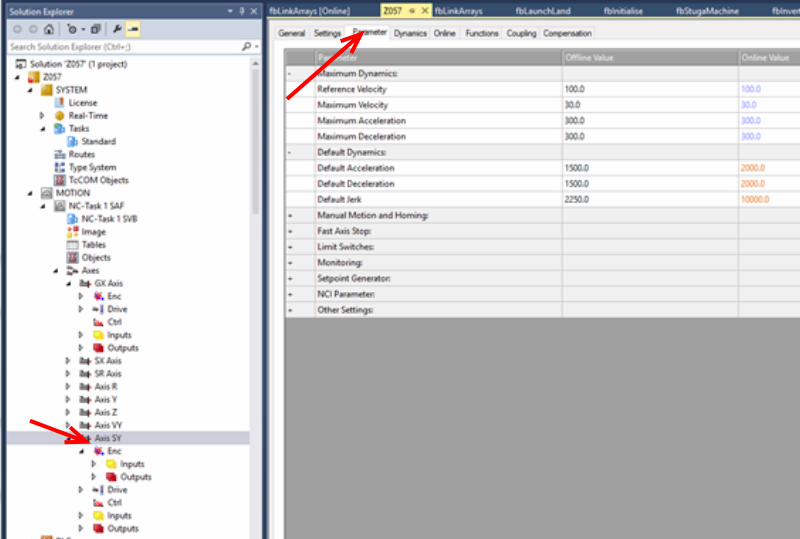
| Parameter | Notes | ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| Ref velocity | in user units – has to match speed range 8012:05.
2000 Steps/sec =50mm per sec on 10mm pitch, doubled for Centraliser with 200 steps/rev 2000/200 |
50 | 50 | 500 | 500 |
| Max Velocity | Stuga Limit (less than Ref velocity) | 15 | 25 | 100 | 100 |
Encoder Setup – Enc
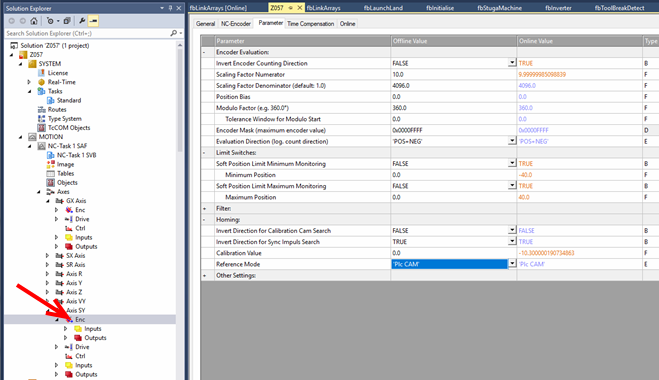
| Parameter | Notes | ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| Numerator | Pitch of leadscrew | 10 | 10 | 100 | 100 |
| Denominator | Encoder counts per rev (if feedback is Encoder) | 4096 | 4096 | 4096 | 4096 |
| Scale | 409.6 | 45.86 | 45.86 | ||
| Note – the above two parameters will be overwritten by the Scale factor from the front end each time the front end is reset | |||||
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português