| [version en cours de rédaction] | [version en cours de rédaction] |
(Page créée avec « {{Tuto Details |Description=<translate>Guide to programming the RS Automation Servo dirves via a USB port and the RSWare software using a UDB file</translate> |Categories=... ») |
|||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| + | |Main_Picture=Programming_RS_Automation_Servo_Drive_Parameters_CSD7.jpg | ||
| + | |Main_Picture_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":47,"top":50,"width":263,"height":192,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.93,"scaleY":1.93,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/e/ed/Programming_RS_Automation_Servo_Drive_Parameters_CSD7.jpg","filters":[]}],"height":449.89662301860784,"width":600} | ||
|Description=<translate>Guide to programming the RS Automation Servo dirves via a USB port and the RSWare software using a UDB file</translate> | |Description=<translate>Guide to programming the RS Automation Servo dirves via a USB port and the RSWare software using a UDB file</translate> | ||
|Categories=Software | |Categories=Software | ||
| Ligne 17 : | Ligne 19 : | ||
{{EPI}} | {{EPI}} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate></translate> | + | |Step_Title=<translate>Run RSWare Software</translate> |
|Step_Content=<translate></translate> | |Step_Content=<translate></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
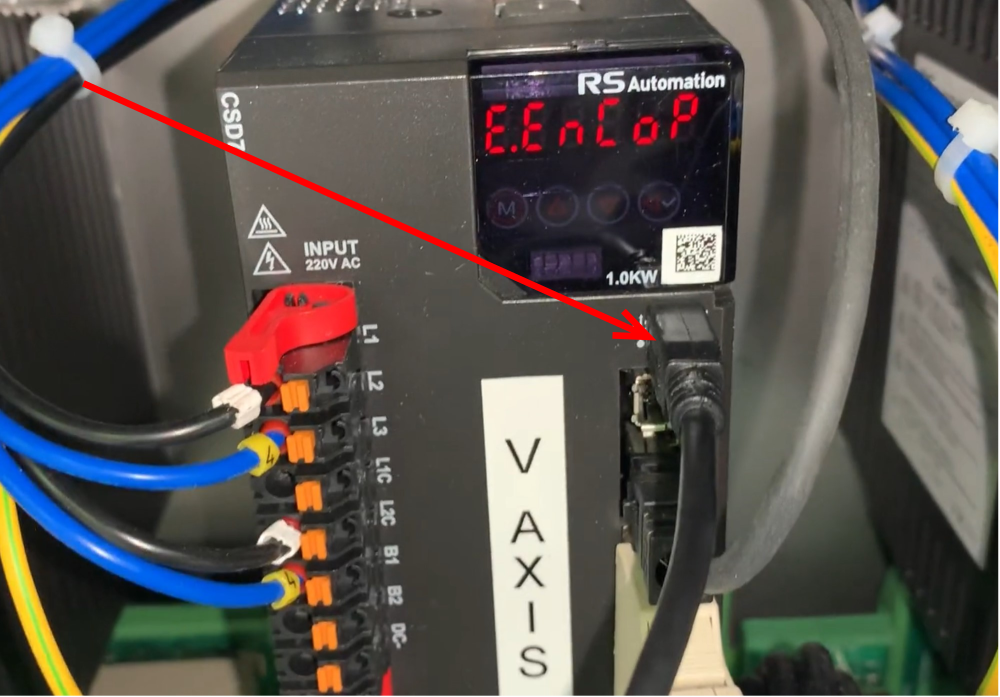
| + | |Step_Title=<translate>Connect USB Cable</translate> | ||
| + | |Step_Content=<translate></translate> | ||
| + | |Step_Picture_00=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_140859.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":1997,"height":1391,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.3,"scaleY":0.3,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/2/2c/Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_140859.jpg","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":219.5,"top":126,"width":339,"height":152,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-169.5,"x2":169.5,"y1":-76,"y2":76,"x2a":154.5235719838177,"y2a":60.51753883014366,"x2b":147.97744097458775,"y2b":75.11713364678148},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":50,"top":50,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":389,"top":202,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":418,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Connect RS Ware to Drive</translate> | ||
| + | |Step_Content=<translate>Select Tools->Serial Port | ||
| + | |||
| + | Select the Latest Serial Port in the list | ||
| + | |||
| + | Click OK</translate> | ||
| + | |Step_Picture_00=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_140945.jpg | ||
| + | |Step_Picture_01=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141013.jpg | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Open the UDB file for the axis</translate> | ||
| + | |Step_Content=<translate>{| class="wikitable" | ||
| + | |+UDB file storage locations in G:\Builds\Latest Software Versions\ | ||
| + | !Machine | ||
| + | !Location | ||
| + | |- | ||
| + | |Ecoline | ||
| + | |\Ecoline.RSAutomation | ||
| + | |- | ||
| + | |Flowline | ||
| + | |\Flowline.RSAutomation | ||
| + | |- | ||
| + | |Standalone Saw | ||
| + | |\Saw.RSAutomation | ||
| + | |} | ||
| + | {{Info|...These files are usually copied over to the root directory of the machine during commissioning}}</translate> | ||
| + | |Step_Picture_00=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141047.jpg | ||
| + | |Step_Picture_01=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141111.jpg | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Scan for the drive</translate> | ||
| + | |Step_Content=<translate>This tells RSware to look for a drive on the serial port you have specified | ||
| + | |||
| + | <br /></translate> | ||
| + | |Step_Picture_00=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141135.jpg | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Drag and Drop</translate> | ||
| + | |Step_Content=<translate>Drag and Drop the loaded drive onto the On-Line Drive. | ||
| + | |||
| + | Click OK to replace the contents | ||
| + | |||
| + | Allow the download to finish | ||
| + | |||
| + | Click OK to reset the drive</translate> | ||
| + | |Step_Picture_00=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141205.jpg | ||
| + | |Step_Picture_01=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141226.jpg | ||
| + | |Step_Picture_02=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141249.jpg | ||
| + | |Step_Picture_03=Programming_RS_Automation_Servo_Drive_Parameters_Annotation_2019-09-19_141308.jpg | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
{{PageLang | {{PageLang | ||
| + | |Language=en | ||
|SourceLanguage=none | |SourceLanguage=none | ||
|IsTranslation=0 | |IsTranslation=0 | ||
| − | |||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
|Complete=Draft | |Complete=Draft | ||
}} | }} | ||
Version actuelle datée du 19 septembre 2019 à 15:14
Guide to programming the RS Automation Servo dirves via a USB port and the RSWare software using a UDB file


Difficulté
Moyen
Durée
5 minute(s)
Introduction
The RS Automation drives are used on refurb Stuga machines to drive axes. They are set up electronically for each axis using a software tool called RSWare and programmed with a USB cable
Vimeo
Étape 1 - Run RSWare Software
Étape 2 - Connect USB Cable
Étape 3 - Connect RS Ware to Drive
Select Tools->Serial Port
Select the Latest Serial Port in the list
Click OK


Étape 4 - Open the UDB file for the axis
| Machine | Location |
|---|---|
| Ecoline | \Ecoline.RSAutomation |
| Flowline | \Flowline.RSAutomation |
| Standalone Saw | \Saw.RSAutomation |


Étape 5 - Scan for the drive
This tells RSware to look for a drive on the serial port you have specified

Étape 6 - Drag and Drop
Drag and Drop the loaded drive onto the On-Line Drive.
Click OK to replace the contents
Allow the download to finish
Click OK to reset the drive




Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português