| [version en cours de rédaction] | [version en cours de rédaction] |
| (Une révision intermédiaire par le même utilisateur non affichée) | |||
| Ligne 50 : | Ligne 50 : | ||
'''Needs to tie up with Ref velocity in NC Parameters – see below''' | '''Needs to tie up with Ref velocity in NC Parameters – see below''' | ||
| − | | | + | |2000 |
| − | |||
| − | |||
| width="103" |2000 | | width="103" |2000 | ||
| width="103" |1000 | | width="103" |1000 | ||
| Ligne 68 : | Ligne 66 : | ||
| width="103" bgcolor="#dbe5f1" |Encoder | | width="103" bgcolor="#dbe5f1" |Encoder | ||
| width="103" bgcolor="#dbe5f1" |Encoder | | width="103" bgcolor="#dbe5f1" |Encoder | ||
| + | |- | ||
| + | |8013:01 | ||
| + | |Kp Factor | ||
| + | |500 | ||
| + | | | ||
| + | | | ||
| + | | | ||
| + | | | ||
|} | |} | ||
{{Warning|...Following Any CoE change you need to do Online reset for EtherCAT master [Right click on Devicenn] NCAxis setup}} | {{Warning|...Following Any CoE change you need to do Online reset for EtherCAT master [Right click on Devicenn] NCAxis setup}} | ||
| Ligne 94 : | Ligne 100 : | ||
2000/200 | 2000/200 | ||
| − | | | + | |50 |
| width="58" valign="top" |50 | | width="58" valign="top" |50 | ||
| width="106" valign="top" |50 | | width="106" valign="top" |50 | ||
| Ligne 102 : | Ligne 108 : | ||
| width="75" valign="top" |'''Max Velocity''' | | width="75" valign="top" |'''Max Velocity''' | ||
| width="208" valign="top" |Stuga Limit (less than Ref velocity) | | width="208" valign="top" |Stuga Limit (less than Ref velocity) | ||
| − | | | + | |15 |
| width="58" valign="top" |15 | | width="58" valign="top" |15 | ||
| width="106" valign="top" |25 | | width="106" valign="top" |25 | ||
| Ligne 123 : | Ligne 129 : | ||
| width="92" valign="top" |'''Numerator''' | | width="92" valign="top" |'''Numerator''' | ||
| width="145" valign="top" |Pitch of leadscrew | | width="145" valign="top" |Pitch of leadscrew | ||
| − | | | + | |10 |
| width="115" valign="top" |10 | | width="115" valign="top" |10 | ||
| width="102" valign="top" |10 | | width="102" valign="top" |10 | ||
| Ligne 139 : | Ligne 145 : | ||
| width="92" valign="top" |'''Scale''' | | width="92" valign="top" |'''Scale''' | ||
| width="145" valign="top" | | | width="145" valign="top" | | ||
| − | | | + | |819.2 |
| − | | width="115" valign="top" |819. | + | | width="115" valign="top" |*819.2 |
| width="102" valign="top" |409.6 | | width="102" valign="top" |409.6 | ||
| width="102" valign="top" |45.86 | | width="102" valign="top" |45.86 | ||
| Ligne 146 : | Ligne 152 : | ||
|- | |- | ||
| colspan="7" width="659" valign="top" |'''Note – the above two parameters will be overwritten by the Scale factor from the front end each time the front end is reset''' | | colspan="7" width="659" valign="top" |'''Note – the above two parameters will be overwritten by the Scale factor from the front end each time the front end is reset''' | ||
| + | |||
| + | |||
| + | <nowiki>*</nowiki>Note the original value of 819.6 was incorrect. It should be 819.2 for 10mm pitch leadscrew | ||
|} | |} | ||
{{Warning|...Activate the configuration at the end}} | {{Warning|...Activate the configuration at the end}} | ||
Version actuelle datée du 29 avril 2024 à 13:55
Tuning of EP7041 box is tricky, but following a step through telephone call with Etienne at Beckhoff, it was successful with the following steps


EP7041 Setup
Set up Remote Box CoE Online Tab

| Parameter | Notes | ZX5 SY
AS2023-H |
ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| 8010 – 04 | Motor Coil Resistance (AS1050 28 [0.28Ohm]) | 32 | 28 | 36 | 36 | 36 |
| 8010 – 06 | Motor FullSteps – always 200 for Beckhoff Steppers | 200 | 200 | 200 | 200 | 200 |
| 8010 – 07 | Encoder Increments – always 4096 for Beckhoff Steppers | 4096 | 4096 | 4096 | 4096 | 4096 |
| 8012 - 05 | Speed range is max speed in motor steps, calculated from pitch, max speed etc.
Needs to tie up with Ref velocity in NC Parameters – see below |
2000 | 2000 | 1000 | 1000 | 1000 |
| 8012 - 08 | Feedback type
Encoder feedback is best as it closes the loop. For open loop, use Internal, but this can loose steps / position |
Encoder | Encoder | Encoder | Encoder | Encoder |
| 8013:01 | Kp Factor | 500 |
Axis Parameters (Under NC Task)
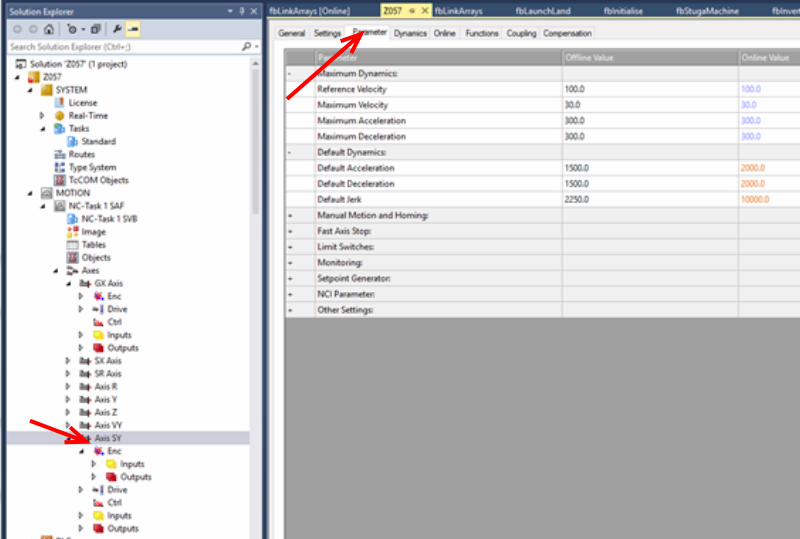
| Parameter | Notes | ZX5 SY
AS2023-H |
ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| Ref velocity | in user units – has to match speed range 8012:05.
2000 Steps/sec =50mm per sec on 10mm pitch, doubled for Centraliser with 200 steps/rev 2000/200 |
50 | 50 | 50 | 500 | 500 |
| Max Velocity | Stuga Limit (less than Ref velocity) | 15 | 15 | 25 | 100 | 100 |
Encoder Setup – Enc
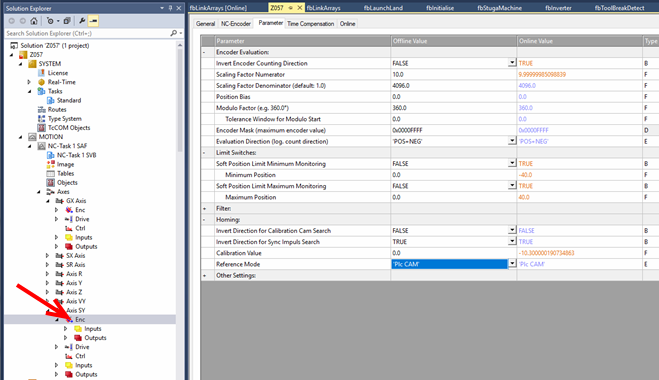
| Parameter | Notes | ZX5 SY
AS2023-H |
ZX5 SY | AF2 SY | AF2 GY | AF2 GZ |
| Numerator | Pitch of leadscrew | 10 | 10 | 10 | 100 | 100 |
| Denominator | Encoder counts per rev (if feedback is Encoder) | 4096 | 4096 | 4096 | 4096 | 4096 |
| Scale | 819.2 | *819.2 | 409.6 | 45.86 | 45.86 | |
| Note – the above two parameters will be overwritten by the Scale factor from the front end each time the front end is reset
| ||||||
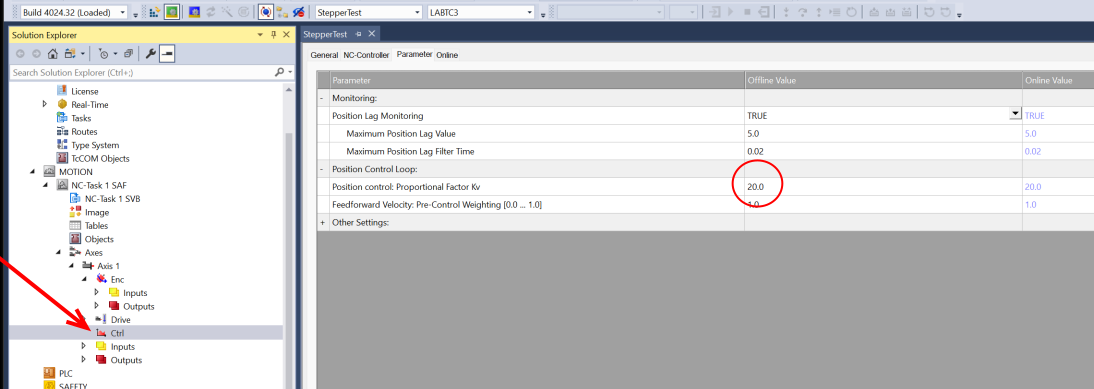
Addendum For SANMOTION 103-H7126-6640

Apply KV value of 20
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português