| [version en cours de rédaction] | [version en cours de rédaction] |
(Page créée avec « {{Tuto Details |Main_Picture=Setting_Ultrasonic_Sensor_-_Horizontal_IMG_1313.jpg |Description=<translate>Setting an ultrasonic sensor mounted vertically</translate> |Diffi... ») |
|||
| (2 révisions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
|Main_Picture=Setting_Ultrasonic_Sensor_-_Horizontal_IMG_1313.jpg | |Main_Picture=Setting_Ultrasonic_Sensor_-_Horizontal_IMG_1313.jpg | ||
| − | |Description=<translate>Setting an ultrasonic sensor mounted | + | |Description=<translate>Setting an ultrasonic sensor mounted horizontally</translate> |
|Difficulty=Easy | |Difficulty=Easy | ||
|Duration=5 | |Duration=5 | ||
| Ligne 8 : | Ligne 8 : | ||
}} | }} | ||
{{Introduction | {{Introduction | ||
| − | |Introduction=<translate>This involves setting a "window" for a minimum and maximum range when mounted | + | |Introduction=<translate>This involves setting a "window" for a minimum and maximum range when mounted horizontally</translate> |
}} | }} | ||
{{TutoVideo | {{TutoVideo | ||
| Ligne 15 : | Ligne 15 : | ||
}} | }} | ||
{{Materials}} | {{Materials}} | ||
| + | {{EPI}} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Ensure there is 30mm clearance from sensor to profile</translate> | |Step_Title=<translate>Ensure there is 30mm clearance from sensor to profile</translate> | ||
| + | |Step_Content=<translate>The sensor will not work unless there is 30mm clearance to minimum position</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_IMG_1310.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":640,"height":480,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.94,"scaleY":0.94,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/8/84/Setting_Ultrasonic_Sensor_-_Horizontal_IMG_1310.jpg","filters":[]}],"height":450,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Place Profile at minimum position</translate> | ||
| + | |Step_Content=<translate>Usually with profile against backfence</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_UltraH00.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":588,"height":421,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.02,"scaleY":1.02,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/f/f2/Setting_Ultrasonic_Sensor_-_Horizontal_UltraH00.jpg","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":213.5,"top":102.5,"width":103,"height":27,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-51.5,"x2":51.5,"y1":13.5,"y2":-13.5,"x2a":34.182201170801555,"y2a":-0.6900880677729502,"x2b":30.1251029635273,"y2b":-16.167166414041407},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":162,"top":116,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":265,"top":89,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":430,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Press and hold button until lights flash</translate> | ||
| + | |Step_Content=<translate>Around 3 seconds</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_UltraH01.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":701,"height":492,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.86,"scaleY":0.86,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/c/c2/Setting_Ultrasonic_Sensor_-_Horizontal_UltraH01.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":430.14,"top":236.14,"width":59.95,"height":59.95,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":29.97642426631293,"ry":29.97642426631293}],"height":421,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Place profile at maximum position</translate> | ||
| + | |Step_Content=<translate>On an Ecoline, around 60mm</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_UltraH02.jpg | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Press and hold until lights stop flashing</translate> | ||
|Step_Content=<translate></translate> | |Step_Content=<translate></translate> | ||
| − | |Step_Picture_00=Setting_Ultrasonic_Sensor_- | + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_UltraH03.jpg |
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":490,"height":359,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.22,"scaleY":1.22,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/8/82/Setting_Ultrasonic_Sensor_-_Horizontal_UltraH03.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":487.39,"top":300.39,"width":80.94,"height":80.94,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":40.46980350133017,"ry":40.46980350133017}],"height":440,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Test with profile</translate> | ||
| + | |Step_Content=<translate>Ensure it turns off and on in the set window</translate> | ||
| + | |Step_Picture_00=Setting_Ultrasonic_Sensor_-_Horizontal_UltraH04.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":734,"height":525,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.82,"scaleY":0.82,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/e/e1/Setting_Ultrasonic_Sensor_-_Horizontal_UltraH04.jpg","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":381.5,"top":305,"width":97,"height":56,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-48.5,"x2":48.5,"y1":28,"y2":-28,"x2a":35.179102384890875,"y2a":-11.07210329876213,"x2b":27.179421243377618,"y2b":-24.92869384745473},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":333,"top":333,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":430,"top":277,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":361,"top":277,"width":86,"height":38,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":43,"x2":-43,"y1":-19,"y2":19,"x2a":-21.47295713153724,"y2a":18.23421586633927,"x2b":-27.939578704672297,"y2b":3.599230200823084},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":404,"top":258,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":318,"top":296,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":429,"width":600} | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
{{PageLang | {{PageLang | ||
| + | |Language=en | ||
|SourceLanguage=none | |SourceLanguage=none | ||
|IsTranslation=0 | |IsTranslation=0 | ||
| − | |||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
|Complete=Draft | |Complete=Draft | ||
}} | }} | ||
Version actuelle datée du 18 avril 2024 à 11:57
Setting an ultrasonic sensor mounted horizontally


Difficulté
Facile
Durée
5 minute(s)
Sommaire
- 1 Introduction
- 2 Video d'introduction
- 3 Étape 1 - Ensure there is 30mm clearance from sensor to profile
- 4 Étape 2 - Place Profile at minimum position
- 5 Étape 3 - Press and hold button until lights flash
- 6 Étape 4 - Place profile at maximum position
- 7 Étape 5 - Press and hold until lights stop flashing
- 8 Étape 6 - Test with profile
- 9 Commentaires
Introduction
This involves setting a "window" for a minimum and maximum range when mounted horizontally
Vimeo
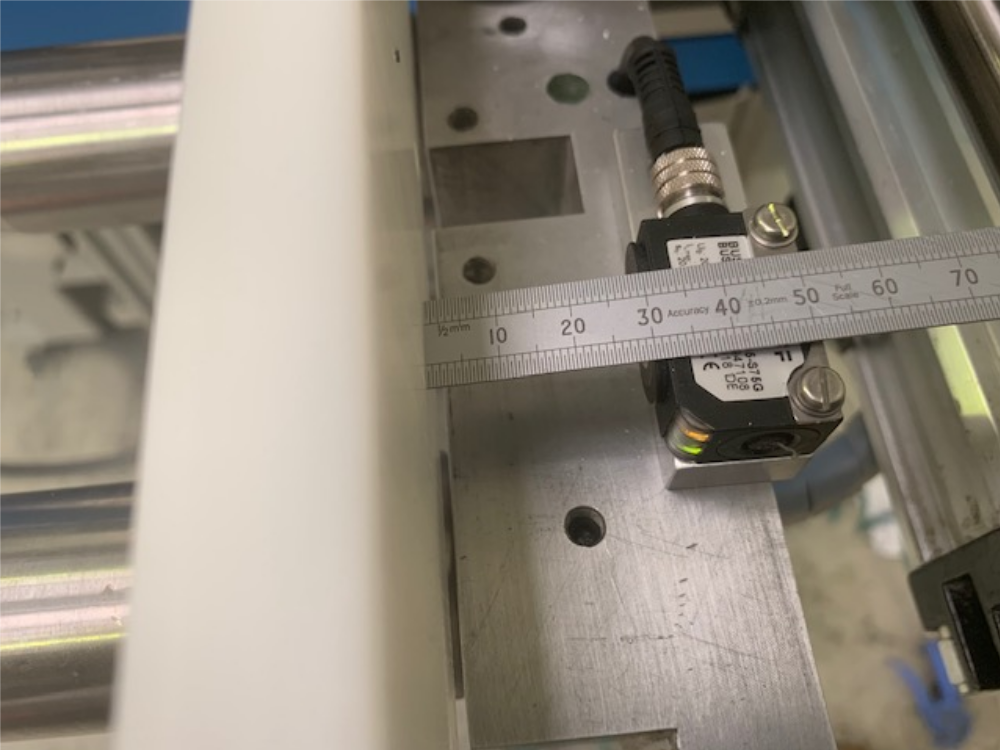
Étape 1 - Ensure there is 30mm clearance from sensor to profile
The sensor will not work unless there is 30mm clearance to minimum position
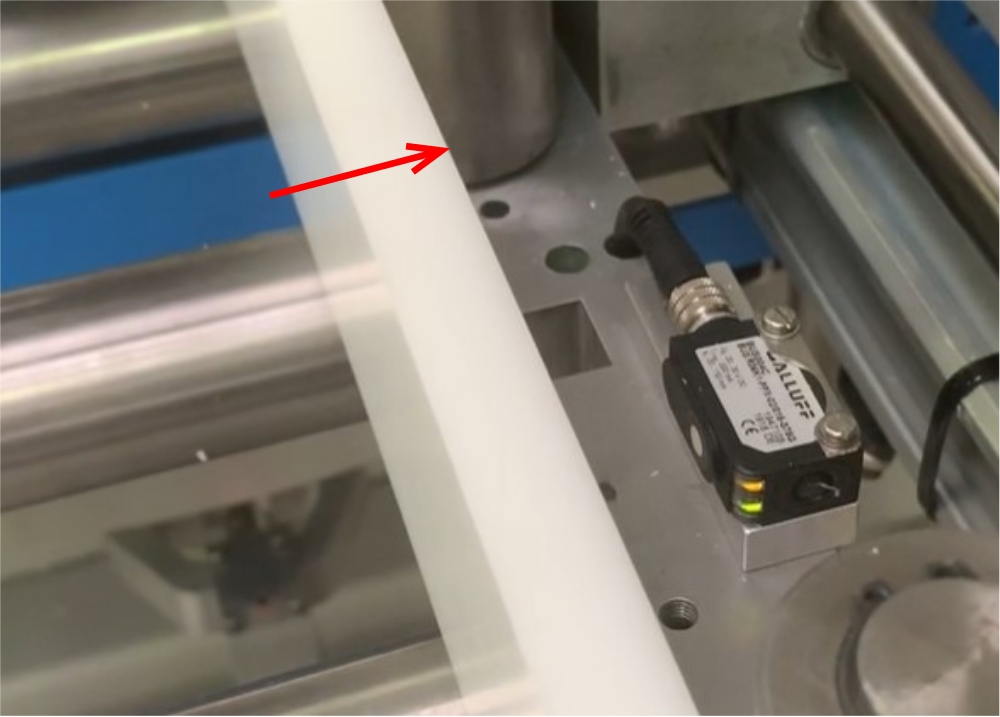
Étape 2 - Place Profile at minimum position
Usually with profile against backfence
Étape 3 - Press and hold button until lights flash
Around 3 seconds

Étape 4 - Place profile at maximum position
On an Ecoline, around 60mm

Étape 5 - Press and hold until lights stop flashing

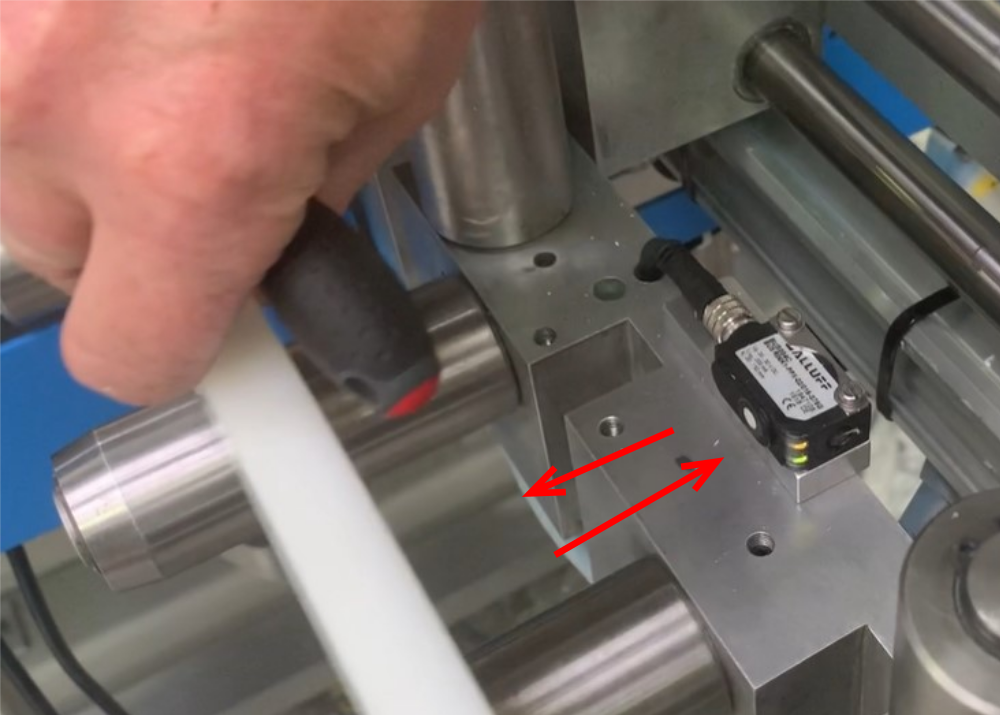
Étape 6 - Test with profile
Ensure it turns off and on in the set window
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português