Notes on issues encountered with Microline transfer to TwinCAT3 setup

In_OCUT1 / LOADD
The infeed 2007 does not have a LOADD sensor.
Confusion over how the code can handle this. It must have worked ok on other infeeds like this (eg Z046).
When investigating in the code, errors found on function blocks fbMotorConvey on inputs to
iArrayError
bNoSensorsCovered
iMeasureErrorMsg
These normally connect to fbArrayMeasure function block, but this does not exist in MHInfeed_2007
Alarms
Disabled alarm for Ipull out - this was a misleading error when it is loading to gripper
Tuning X axis drive
Following error on X axis stopped the axis on loading
When tuning took place, the bar was not clamped
Tried a reversing move with clamps on.
At Speed 10, following error was 0.2
At speed 50, following error was 1
At speed 100, the following error was 2mm
This shows a proportional increse in following error as spee increases
Tried changing drive P-Gain, no effect
Changed 3.02 Kff Gain (feed forward. Was on zero
Following error dropped proportionally to ff gain 0-100%
Set at 100%. Seems to easy
After a power off, and on, the problem came back. Checking the drive Kff, it was set to 50%
With some trial and error, the CoE parameter for this setting was identified (2302)

This has now need set up as a startup parameter, so will exist even after a drive change
Spindles
invert300Hz=1
InverterOkHigh=1
Input In_InvOk mapped to 90 and configured in alarms
ringType=Mk3with DP
Unloading
Check parameters in sl;oadpos
Positions of pushers relatibe to spindle c/l
1780
3055
Clear positions
2150
3425
longejpos should then be 1600
CLOSV (IORef 408)
Kept switching off with no pressure. Possibly switching on and off very rapidly, but not proven. This gave a really difficult issue to trace. Root cause as yet unknown, but problem can be bypassed using Ioref 418 instead of 408. Same issue as Nextmove Controller upgrades
Could find no references to io 408 in the whole project
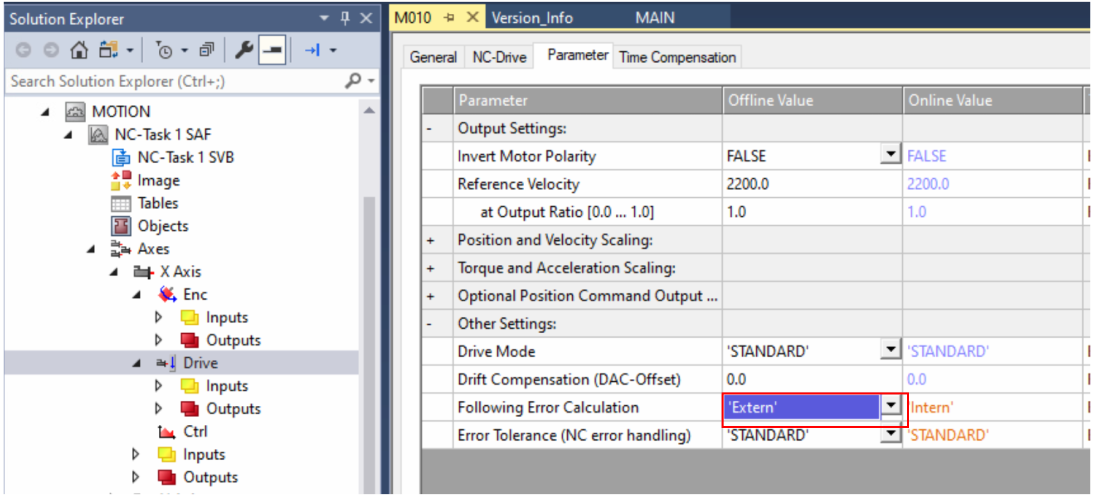
M010 Following Error would not reduce
M010 had a difficult to trace problem with the follwoing error. It would not reduce, even after increasing Kff to 100. The error was completely proportional to the speed, and did reduce with Kff, but not to zero. On the X axis this gave a fol error of 60 with spoeed of 2000
Eventually traced by loading M006 project. This worked as expected, therefore problem is not with drive or motor, it has to be the software setup.
Compared M006 and M010 axis and drive set up side by side.
Traced root casue to Internal / External Following Error Calculation parameter on the Axis->Drive->Other Settings
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português