
| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 58 : | Ligne 58 : | ||
# Click Save All | # Click Save All | ||
{{Info|...Check the date next to the machine types - you will want the latest one}}<br /></translate> | {{Info|...Check the date next to the machine types - you will want the latest one}}<br /></translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_131858.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 68 : | Ligne 69 : | ||
# If there is a request for a platform change, click Yes | # If there is a request for a platform change, click Yes | ||
# On success, the Route dropdown will not read Error</translate> | # On success, the Route dropdown will not read Error</translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132349.jpg | ||
| + | |Step_Picture_01=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132519.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Scan for Devices | + | |Step_Title=<translate>Scan for Devices</translate> |
|Step_Content=<translate>#Expand IO | |Step_Content=<translate>#Expand IO | ||
#Right click on devices, Scan | #Right click on devices, Scan | ||
| + | #Click OK on the Hint: | ||
#Untick RT-Ethernet | #Untick RT-Ethernet | ||
#Untick COM-Port | #Untick COM-Port | ||
| Ligne 78 : | Ligne 82 : | ||
#Scan for boxes - Yes | #Scan for boxes - Yes | ||
#If there is a request for New Device Type, Click Apply to All, Click Yes | #If there is a request for New Device Type, Click Apply to All, Click Yes | ||
| − | |||
| + | <br /></translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132424.jpg | ||
| + | |Step_Picture_01=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132612.jpg | ||
| + | |Step_Picture_02=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132645.jpg | ||
| + | |Step_Picture_03=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132706.jpg | ||
| + | |Step_Picture_04=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_132815.jpg | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Check EtherCAT validity</translate> | ||
| + | |Step_Content=<translate>Check the Devices and boxes match the expected EtherCAT setup{{Idea|...Check the green lights on the etherCAT boxes for connection status. Flickering Green means it is OK}}Repeat steps 7 and 8 until the physical network matches the scanned network | ||
| − | + | You may need to Right Click->scan Boxes on the second device if the EtherCAT boxes do not appear | |
| + | <br />{{Idea|...If the boxes do not appear in the right order, there could be an EtherCAT In /Out crossover}}<br /></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Name all EtherCAT devices according to network</translate> | ||
| + | |Step_Content=<translate>Click twice on each device (not double click) to enable the device to be renamed | ||
| − | + | rename to [https://stuga.dokit.app/wiki/Naming_Conventions_for_Electrical_Components convention]</translate> | |
| − | < | + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143904.jpg |
| − | < | + | }} |
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Add Drive Configurator</translate> | ||
| + | |Step_Content=<translate>{{Info|...This step needs to be done for the AX8000 drives only}}</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Double check all IO references with someone else</translate> | ||
| + | |Step_Content=<translate>Any mistakes made will save hours if spotted here</translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate> | + | |Step_Title=<translate>Activate configuration</translate> |
|Step_Content=<translate></translate> | |Step_Content=<translate></translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143629.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":20,"top":20,"width":1057,"height":817,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":2.25,"scaleY":2.25,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/9/90/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143629.jpg","filters":[]},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":94.27,"top":225.27,"width":47.99,"height":47.99,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0}],"height":450,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Add Axis Task</translate> | ||
| + | |Step_Content=<translate>Axis task may need to be added under the MOTION tree: | ||
| + | |||
| + | # Add New Item | ||
| + | # NC/PTP Configuration | ||
| + | # Leave the Name as default</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Add Axes</translate> | ||
| + | |Step_Content=<translate>If the axes do not exist under MOTION->NC Task->Axes, add them | ||
| + | |||
| + | # Right Click Add axis | ||
| + | # Name to convention nn Axis | ||
| + | |||
| + | |||
| + | Repeat for each axis on machine</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Map Axes</translate> | ||
| + | |Step_Content=<translate># Double click an axis | ||
| + | # Settings tab | ||
| + | # Click Link To IO | ||
| + | # Connect to associated Drive | ||
| + | |||
| + | |||
| + | Repeat for each axis | ||
| + | |||
| + | {{Warning|...Make sure you select the correct channel number / letter is it is a dual drive}}<br /></translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Add Drive Configurator</translate> | |Step_Title=<translate>Add Drive Configurator</translate> | ||
|Step_Content=<translate>{{Info|...This step needs to be done for the AX8000 drives only}}</translate> | |Step_Content=<translate>{{Info|...This step needs to be done for the AX8000 drives only}}</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Map all IO</translate> | ||
| + | |Step_Content=<translate>Using the circuit diagrams, link all the IO refs up to the inputs and outputs | ||
| + | |||
| + | # Double click on the slices and Field Bus boxes in turn | ||
| + | # Ensure you can see the Input / output channels (may need some resizing | ||
| + | # Double click on the relevant IO channel | ||
| + | # Type the number in the box | ||
| + | # For Inputs, use ibInputArray and match the number. outputs use qbOutputArray | ||
| + | |||
| + | |||
| + | Repeat for all IO | ||
| + | |||
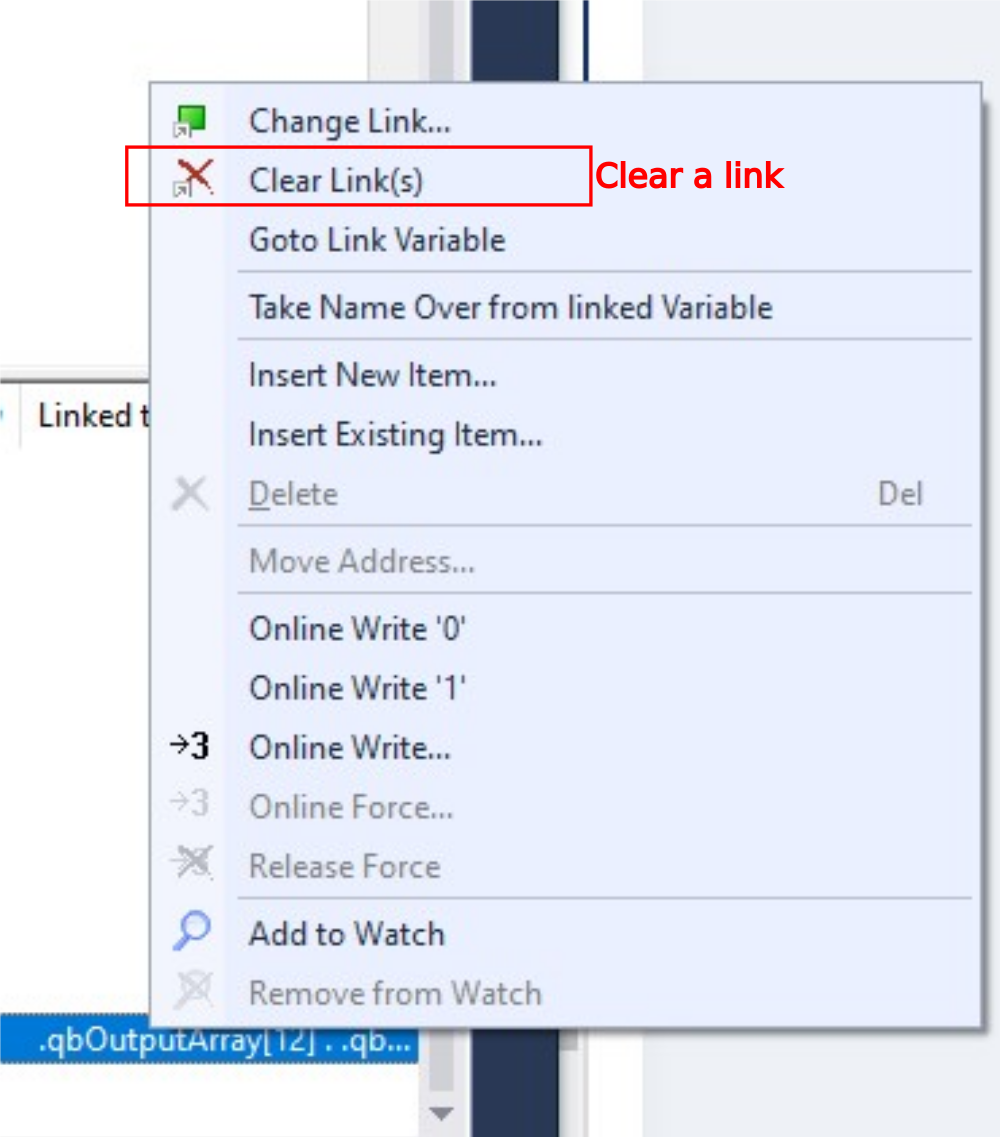
| + | <br />{{Warning|...Make sure you are using ibInputArray and qbOutputArray and not any others}}{{Pin|...Once you have used a reference, it disappears. if you have done this wrong, you can right click->clear the link}}<br /></translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143613.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":1050,"height":813,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.57,"scaleY":0.57,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/9/97/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143613.jpg","filters":[]},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":389.54,"top":290.07,"width":372.09,"height":22.95,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":305.5,"top":252.5,"width":1,"height":47,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-0.5,"x2":0.5,"y1":23.5,"y2":-23.5,"x2a":8.072754210645003,"y2a":-3.334351146934093,"x2b":-7.923625470268037,"y2b":-3.6746996507833067},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":305,"top":276,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":306,"top":229,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":307,"top":361,"width":0,"height":112,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":0,"x2":0,"y1":-56,"y2":56,"x2a":8,"y2a":36,"x2b":-8,"y2b":36},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":307,"top":305,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":307,"top":417,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":465,"width":600} | ||
| + | |Step_Picture_01=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143629.jpg | ||
| + | |Step_Picture_02=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143716.jpg | ||
| + | |Step_Picture_02_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":587,"height":469,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.02,"scaleY":1.02,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/2/2f/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143716.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":91.66,"top":51.76,"width":59.7,"height":36.46,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":29.8487335084682,"ry":18.230760741782483},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":252.19,"top":142.27,"width":234.63,"height":22.54,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0},{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":286.34,"top":116,"width":118.71,"height":22.6,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"Double Click","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} }],"height":479,"width":600} | ||
| + | |Step_Picture_03=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143739.jpg | ||
| + | |Step_Picture_03_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":584,"height":472,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.03,"scaleY":1.03,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/b/bf/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143739.jpg","filters":[]},{"type":"wfellipse","version":"2.4.6","originX":"center","originY":"center","left":95.21,"top":53.32,"width":64.64,"height":35.59,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":32.32181383717859,"ry":17.792773690712732}],"height":485,"width":600} | ||
| + | |Step_Picture_04=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143822.jpg | ||
| + | |Step_Picture_04_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":371,"height":422,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.62,"scaleY":1.62,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/8/87/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143822.jpg","filters":[]},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":215.31,"top":105.57,"width":278.47,"height":34.67,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0},{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":430.05,"top":106,"width":145.91,"height":22.6,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"Clear a link","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} }],"height":682,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Double check all IO references with someone else</translate> | ||
| + | |Step_Content=<translate>Any mistakes made will save hours if spotted here</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Activate configuration</translate> | ||
| + | |Step_Content=<translate></translate> | ||
| + | |Step_Picture_00=Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143629.jpg | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":20,"top":20,"width":1057,"height":817,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":2.25,"scaleY":2.25,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/9/90/Create_a_TwinCAT_Project_from_Scratch_Annotation_2019-11-20_143629.jpg","filters":[]},{"type":"wfrect","version":"2.4.6","originX":"center","originY":"center","left":94.27,"top":225.27,"width":47.99,"height":47.99,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":2,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"rx":0,"ry":0}],"height":450,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Add Axis Task</translate> | ||
| + | |Step_Content=<translate>Axis task may need to be added under the MOTION tree: | ||
| + | |||
| + | # Add New Item | ||
| + | # NC/PTP Configuration | ||
| + | # Leave the Name as default</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Add Axes</translate> | ||
| + | |Step_Content=<translate>If the axes do not exist under MOTION->NC Task->Axes, add them | ||
| + | |||
| + | # Right Click Add axis | ||
| + | # Name to convention nn Axis | ||
| + | |||
| + | |||
| + | Repeat for each axis on machine</translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Map Axes</translate> | ||
| + | |Step_Content=<translate># Double click an axis | ||
| + | # Settings tab | ||
| + | # Click Link To IO | ||
| + | # Connect to associated Drive | ||
| + | |||
| + | |||
| + | Repeat for each axis | ||
| + | |||
| + | {{Warning|...Make sure you select the correct channel number / letter is it is a dual drive}}<br /></translate> | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
Version du 20 novembre 2019 à 16:45
How to create a new TwinCAT3 Project from scratch

Difficulté
Difficile
Durée
4 heure(s)
Sommaire
- 1 Étape 1 - Start a new project
- 2 Étape 2 - Add PLC Project for Reset
- 3 Étape 3 - Add PLC Project for tcMulti
- 4 Étape 4 - Ensure Correct Machine Commented in tcMulti project
- 5 Étape 5 - Add TwinSAFE project
- 6 Étape 6 - Add the route to the PLC
- 7 Étape 7 - Scan for Devices
- 8 Étape 8 - Check EtherCAT validity
- 9 Étape 9 - Name all EtherCAT devices according to network
- 10 Étape 10 - Add Drive Configurator
- 11 Étape 11 - Double check all IO references with someone else
- 12 Étape 12 - Activate configuration
- 13 Étape 13 - Add Axis Task
- 14 Étape 14 - Add Axes
- 15 Étape 15 - Map Axes
- 16 Étape 16 - Add Drive Configurator
- 17 Étape 17 - Map all IO
- 18 Étape 18 - Double check all IO references with someone else
- 19 Étape 19 - Activate configuration
- 20 Étape 20 - Add Axis Task
- 21 Étape 21 - Add Axes
- 22 Étape 22 - Map Axes
- 23 Commentaires
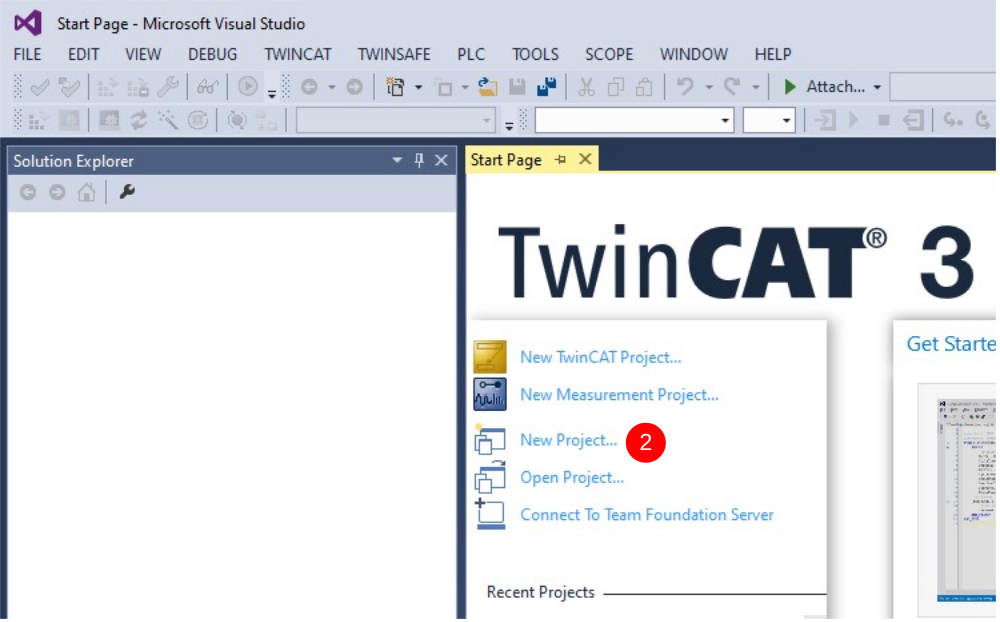
Étape 1 - Start a new project
- Open Visual Studio
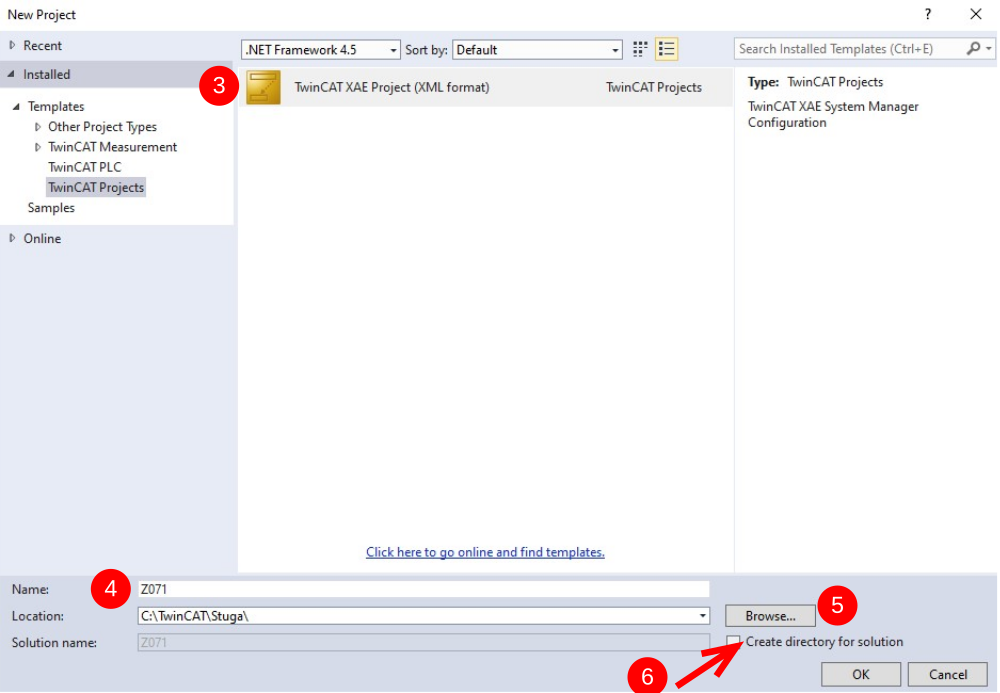
- Click on New project
- Choose TwinCAT projects->TwinCAT XAE Project (xml format)
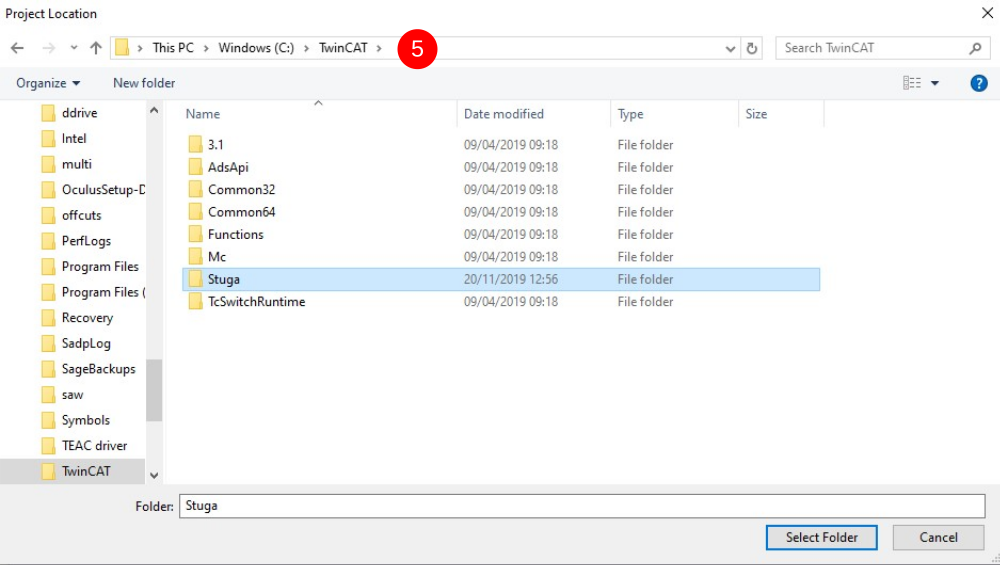
- Name is build number (no Suffix)
- Location is c:\TwinCAT\Stuga\
- Untick "Create Directory for solution"
This creates the template
Étape 2 - Add PLC Project for Reset
- On PLC, right click and Add Existing Item
- Navigate to g:\Design\TwinCAT3\PLC_Reset_1_1
- Select the .Plcproj file
- Copy Project to solution file



Étape 3 - Add PLC Project for tcMulti
- Add Existing Item
- Navigate to g:\Design\TwinCAT3\tcMulti_6_24
- Select the .Plcproj file
- Copy Project to solution file

Étape 4 - Ensure Correct Machine Commented in tcMulti project
- Navigate to tcMulti_6_24 project->POUs->MAIN
- Scroll down to the machine types. The "comment State" can be toggled on and off by right clicking next to the step number on the left
- Your goal is to ensure the correct machine is highlighted and the incorrect ones are commented out (in green)
- Click Save All

Étape 5 - Add TwinSAFE project
Étape 6 - Add the route to the PLC
- From Dropdown box select the Build number (If it does not exist we will need to add a new route)
- If there is a request for a platform change, click Yes
- On success, the Route dropdown will not read Error


Étape 7 - Scan for Devices
- Expand IO
- Right click on devices, Scan
- Click OK on the Hint:
- Untick RT-Ethernet
- Untick COM-Port
- Just have the EtherCAT ports
- Scan for boxes - Yes
- If there is a request for New Device Type, Click Apply to All, Click Yes





Étape 8 - Check EtherCAT validity
Check the Devices and boxes match the expected EtherCAT setupRepeat steps 7 and 8 until the physical network matches the scanned networkYou may need to Right Click->scan Boxes on the second device if the EtherCAT boxes do not appear
Étape 9 - Name all EtherCAT devices according to network
Click twice on each device (not double click) to enable the device to be renamed
rename to convention

Étape 10 - Add Drive Configurator
Étape 11 - Double check all IO references with someone else
Any mistakes made will save hours if spotted here
Étape 12 - Activate configuration
Étape 13 - Add Axis Task
Axis task may need to be added under the MOTION tree:
- Add New Item
- NC/PTP Configuration
- Leave the Name as default
Étape 14 - Add Axes
If the axes do not exist under MOTION->NC Task->Axes, add them
- Right Click Add axis
- Name to convention nn Axis
Repeat for each axis on machine
Étape 15 - Map Axes
- Double click an axis
- Settings tab
- Click Link To IO
- Connect to associated Drive
Repeat for each axis
Étape 16 - Add Drive Configurator
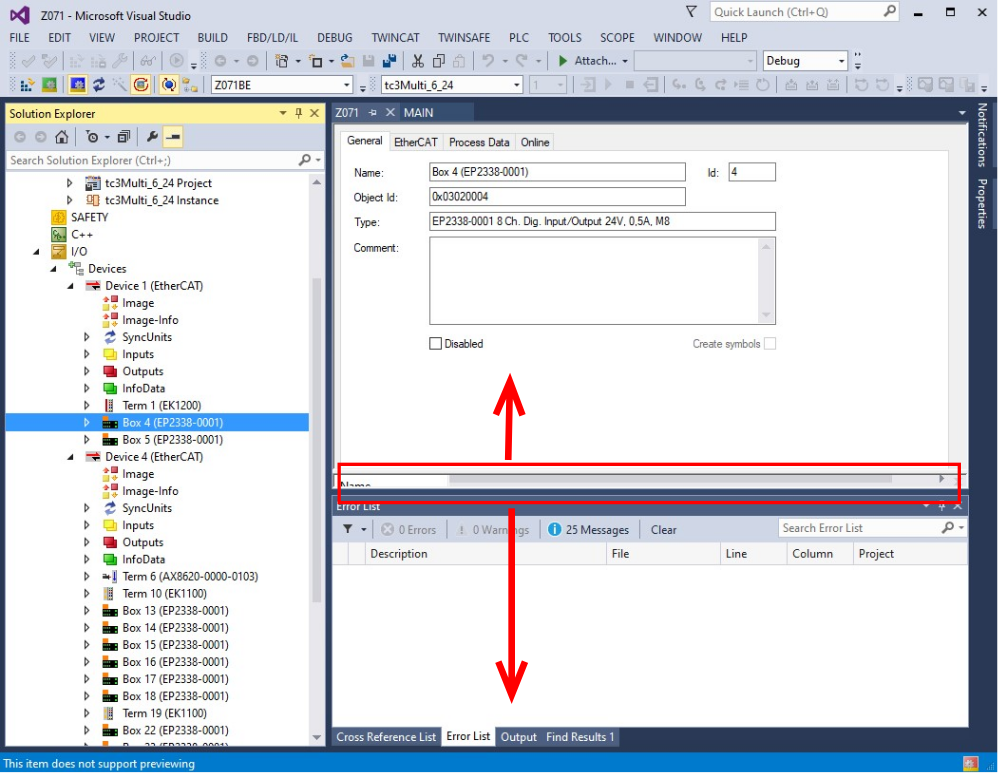
Étape 17 - Map all IO
Using the circuit diagrams, link all the IO refs up to the inputs and outputs
- Double click on the slices and Field Bus boxes in turn
- Ensure you can see the Input / output channels (may need some resizing
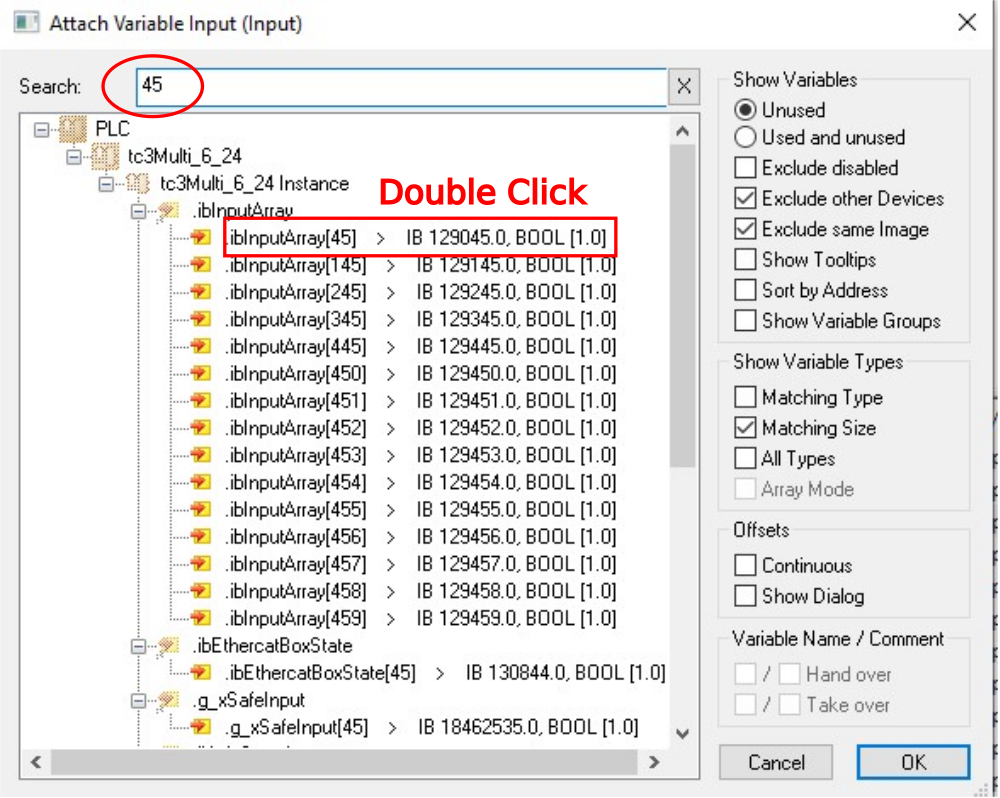
- Double click on the relevant IO channel
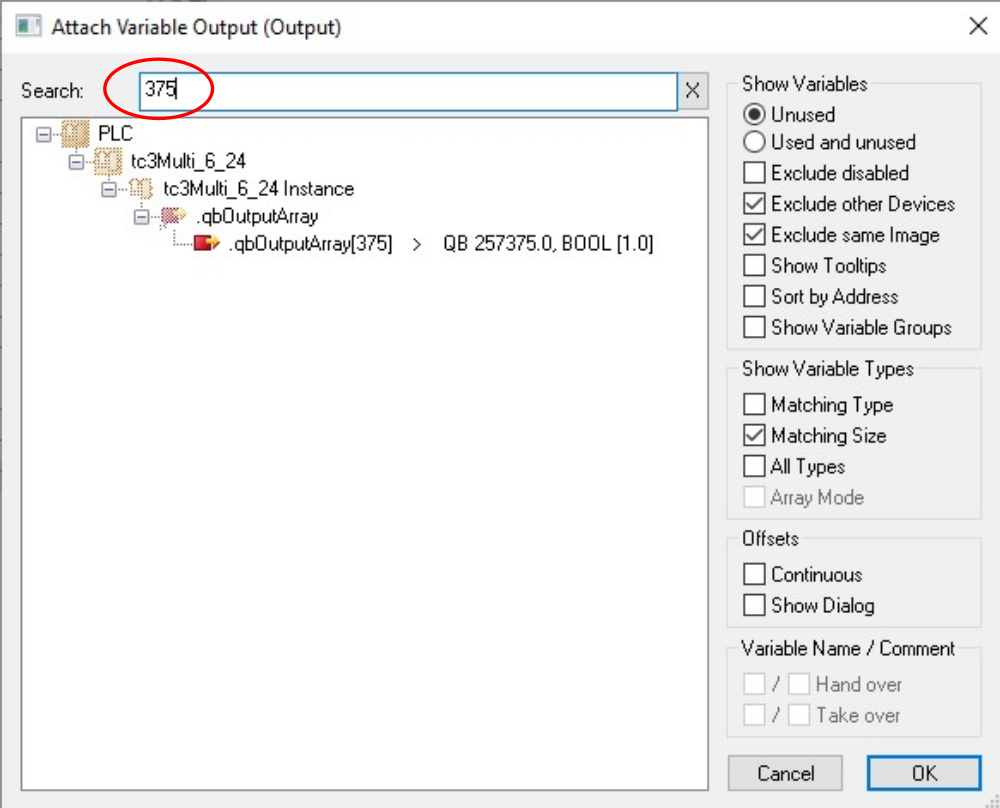
- Type the number in the box
- For Inputs, use ibInputArray and match the number. outputs use qbOutputArray
Repeat for all IO

Étape 18 - Double check all IO references with someone else
Any mistakes made will save hours if spotted here
Étape 19 - Activate configuration
Étape 20 - Add Axis Task
Axis task may need to be added under the MOTION tree:
- Add New Item
- NC/PTP Configuration
- Leave the Name as default
Étape 21 - Add Axes
If the axes do not exist under MOTION->NC Task->Axes, add them
- Right Click Add axis
- Name to convention nn Axis
Repeat for each axis on machine
Étape 22 - Map Axes
- Double click an axis
- Settings tab
- Click Link To IO
- Connect to associated Drive
Repeat for each axis
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português