| [version en cours de rédaction] | [version en cours de rédaction] |
| Ligne 51 : | Ligne 51 : | ||
| − | + | Adjust the pressure until you can turn the leadscrew of the GZ axis by hand. (6 bar) | |
{{Warning|Do not move the GY axis if the counterbalance is active}} | {{Warning|Do not move the GY axis if the counterbalance is active}} | ||
| Ligne 67 : | Ligne 67 : | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Drive Manager 2 and Support Jetter Files</translate> | |Step_Title=<translate>Drive Manager 2 and Support Jetter Files</translate> | ||
| − | |Step_Content=<translate>Ensure Drive Manager 2 is installed. | + | |Step_Content=<translate>Ensure Drive Manager 2 is installed (Verion 1.1.60.0 minimum) |
Copy the files from : | Copy the files from : | ||
| Ligne 80 : | Ligne 80 : | ||
| − | to | + | to C:\TwinCAT\Functions\TE5950-Drive-Manager-2\Database\Motors |
<br /></translate> | <br /></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Basic Assumptions</translate> | ||
| + | |Step_Content=<translate>The Motor are connected to an AX5203 Drive | ||
| + | |||
| + | GY on the A channel | ||
| + | |||
| + | GZ on the B channel | ||
| + | |||
| + | The Drive is labelled GY & GZ | ||
| + | |||
| + | The channels are mapped to AXIS with appropriate names</translate> | ||
| + | |Step_Picture_00=GY_GZ_axis_setup_with_Jetter_Motors_DriveNames.png | ||
| + | |Step_Picture_01=GY_GZ_axis_setup_with_Jetter_Motors_AxisNames.png | ||
| + | |Step_Picture_02=GY_GZ_axis_setup_with_Jetter_Motors_DriveManager2Visual.png | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>GY setup Motor</translate> | ||
| + | |Step_Content=<translate># Double click on GY axis (Ch A ) in drive manager 2 . You will not see the information highlighted yet. | ||
| + | # For the Motor Press select then select the filter options. | ||
| + | # Select Import. | ||
| + | # Move to the folder C:\TwinCAT\Functions\TE5950-Drive-Manager-2\Database\Motors | ||
| + | # Select the GY and Open | ||
| + | # The parameters shold all mactch the screen shots.</translate> | ||
| + | |Step_Picture_00=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_1.png | ||
| + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":1861,"height":1098,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.32,"scaleY":0.32,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/1/1e/GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_1.png","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":100,"top":120,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"1","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":1}],"height":354,"width":600} | ||
| + | |Step_Picture_01=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_2.png | ||
| + | |Step_Picture_01_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":588,"height":901,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1.02,"scaleY":1.02,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/4/49/GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_2.png","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":10,"top":227,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"2","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":2}],"height":919,"width":600} | ||
| + | |Step_Picture_02=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_3.png | ||
| + | |Step_Picture_03=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_4.png | ||
| + | |Step_Picture_03_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":2482,"height":1390,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.24,"scaleY":0.24,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://stuga.dokit.app/images/7/7c/GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_4.png","filters":[]},{"type":"wfnumberedbullet","version":"2.4.6","originX":"left","originY":"top","left":55,"top":24,"width":25,"height":25,"fill":"rgb(0,0,0)","stroke":"#FF0000","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"objects":[{"type":"circle","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":24,"height":24,"fill":"#FF0000","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":12,"startAngle":0,"endAngle":6.283185307179586},{"type":"text","version":"2.4.6","originX":"center","originY":"center","left":0,"top":0,"width":7.79,"height":15.82,"fill":"rgba(255,255,255,255)","stroke":null,"strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"4","fontSize":14,"fontWeight":"normal","fontFamily":"arial","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"styles":{} }],"number":4}],"height":336,"width":600} | ||
| + | |Step_Picture_04=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_5.png | ||
| + | |Step_Picture_05=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_6.png | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>GY Setup FeedBack</translate> | ||
| + | |Step_Content=<translate># From the Manager Scrren Press Select fo "Feedback 1" | ||
| + | # Under filter Select as shown (Hiperface being the important one) | ||
| + | # Expand Sick#SKx and select SKM36- HFA0-S05 and OK</translate> | ||
| + | |Step_Picture_00=GY_GZ_axis_setup_with_Jetter_Motors_GY_DRIVEMANAGER_-_7.png | ||
}} | }} | ||
{{Notes}} | {{Notes}} | ||
Version du 9 mars 2023 à 15:56
Autoflow MK4 GY&GZ axis setup with Jetter Motors

Difficulté
Moyen
Durée
2 heure(s)
Sommaire
- 1 Introduction
- 2 Étape 1 - Initial Preperation
- 3 Étape 2 - GY Axis:
- 4 Étape 3 - GZ Axis
- 5 Étape 4 - Counterbalance
- 6 Étape 5 - CX5203 Firmware Upgrade
- 7 Étape 6 - Drive Manager 2 and Support Jetter Files
- 8 Étape 7 - Basic Assumptions
- 9 Étape 8 - GY setup Motor
- 10 Étape 9 - GY Setup FeedBack
- 11 Commentaires
Introduction
WARNING:
The Jetter motor on the GZ axis has a brake. Release the brake without control could be harmful.
Use the Air Counterbalance rig to assist if necessary.
Étape 1 - Initial Preperation
Ensure that the profile support arm is held out of the way to avoid marking the blue infeed arm.

Étape 2 - GY Axis:
Check that proximity arm is in between the proximity sensor.
You should be able to turn the leadscrew by hand to move it.

Étape 3 - GZ Axis
Check that proximity arm is in between the proximity sensor
This has a brake and you can only turn the leadscrew by hand if the counterbalance is fitted.

Étape 4 - Counterbalance
Counterbalance fitted under the carriage.
Adjust the pressure until you can turn the leadscrew of the GZ axis by hand. (6 bar)
.

Étape 5 - CX5203 Firmware Upgrade
The firmware on the CX5203 must be high enought to be supported under Drive manager 2.
Follow the Dokit .....................................................
Étape 6 - Drive Manager 2 and Support Jetter Files
Ensure Drive Manager 2 is installed (Verion 1.1.60.0 minimum)
Copy the files from :
G:\Design\TwinCAT3\Other Motor Definition Files
GY Jetter JHN2-0028-18 SyncRot.dmmotor
GZ Jetter JHN2-0075-027 SyncRot.dmmotor
to C:\TwinCAT\Functions\TE5950-Drive-Manager-2\Database\Motors
Étape 7 - Basic Assumptions
The Motor are connected to an AX5203 Drive
GY on the A channel
GZ on the B channel
The Drive is labelled GY & GZ
The channels are mapped to AXIS with appropriate names



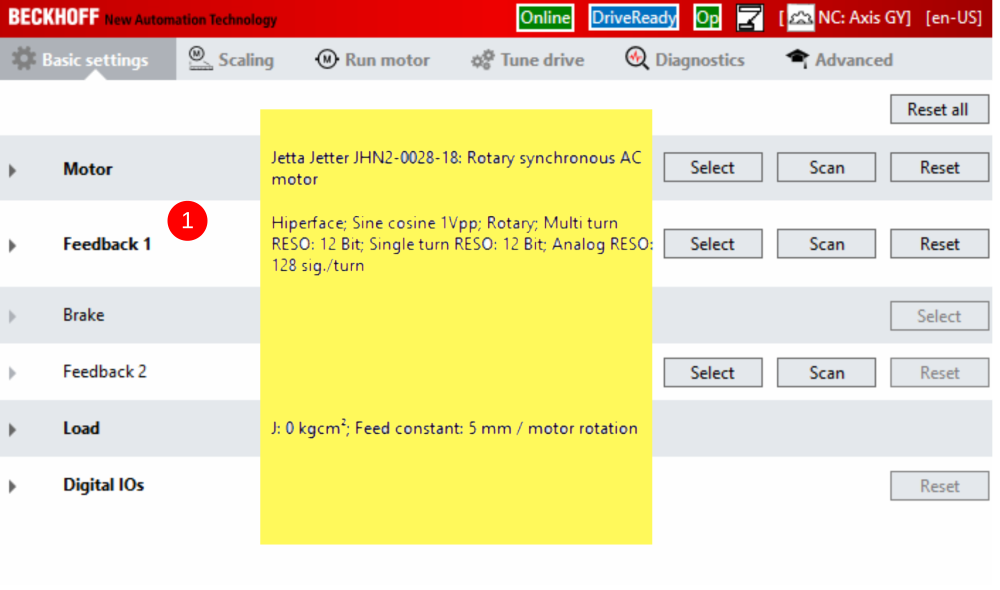
Étape 8 - GY setup Motor
- Double click on GY axis (Ch A ) in drive manager 2 . You will not see the information highlighted yet.
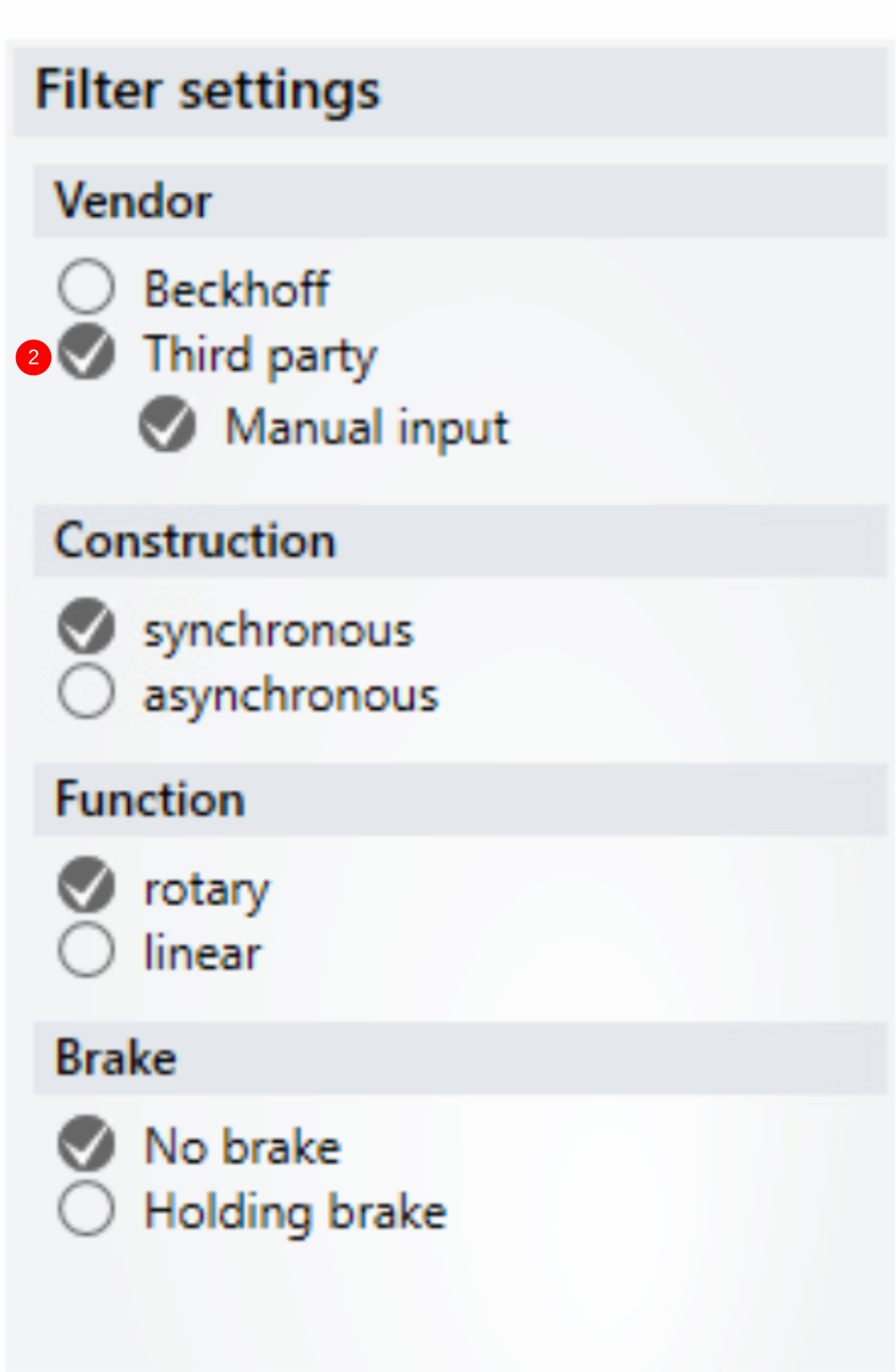
- For the Motor Press select then select the filter options.
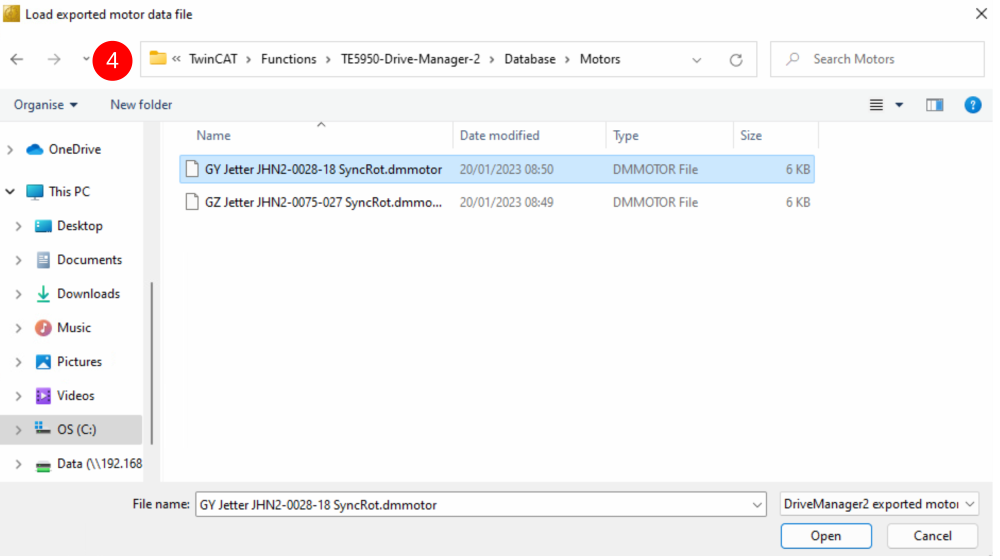
- Select Import.
- Move to the folder C:\TwinCAT\Functions\TE5950-Drive-Manager-2\Database\Motors
- Select the GY and Open
- The parameters shold all mactch the screen shots.



Étape 9 - GY Setup FeedBack
- From the Manager Scrren Press Select fo "Feedback 1"
- Under filter Select as shown (Hiperface being the important one)
- Expand Sick#SKx and select SKM36- HFA0-S05 and OK

Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português